СООС № 11 Несущий винт: особенности конструкции и аэромеханика
На сегодняшний день свыше 95% мирового вертолетного парка составляют машины классической одновинтовой схемы. Однако в последнее время все больший интерес проявляется к вертолетам соосной схемы несущего винта. Об особенностях аэромеханики соосных вертолетов, которые давно и успешно исследуются специалистами фирмы «Камов», и пойдет речь в этой статье.
Адекватное математическое представление явлений аэромеханики соосных винтов дает возможность объяснить и предсказать такие явления, как собственные частоты лопастей винтов, нагрузки и деформации, границы аэроупругой устойчивости (границу флаттера, срывной флаттер, земной резонанс), а также летные данные вертолета.
Специально проектировались в ЦАГИ аэродинамические профили лопастей для Ka-50, Ka-115, Ka-226 (рис.1). Оптимальная комбинация аэродинамических характеристик профилей Су Схр , Cm (a, M) обеспечила достаточный запас скорости до границы флаттера в поступательном полете, а также необходимые условия достижения высоких перегрузок и границы «срыва», низких нагрузок на винтах и в проводке управления, низкого уровня вибраций, высоких летных данных вертолета. С этой же целью была разработана стреловидная законцовка лопасти.
Использование базовых технических решений позволило достичь высоких характеристик не только соосных винтов, но и вертолета в целом.
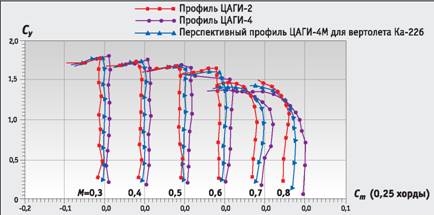
Рис.1. Аэродинамические характеристики существующих аэродинамических профилен ЦАГИ-2, ЦАГИ-4 и перспективного профиля ЦАГИ-4М
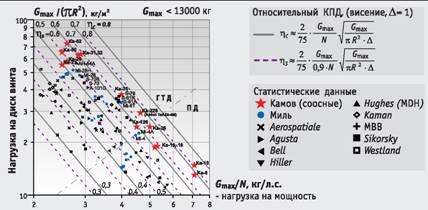
Рис. 2. Статическая диаграмма. Нагрузка на мощность, нагрузка на диск, относительный КПД для соосных вертолетов и вертолетов с рулевым винтом
Особенности аэродинамики
Характерная особенность соосного несущего винта – высокое аэродинамическое совершенство на режиме висения – определяется дополнительным количеством воздуха, всасываемого нижним несущим винтом (рис. 2). Относительный КПД соосного винта на режиме висения на 13% больше КПД одиночного винта, не сбалансированного крутящим моментом. При отсутствии потерь мощности на привод рулевого винта относительный КПД соосного вертолета увеличивается на 20% (рис. 2).
На рис. 3 представлены результаты определения относительных КПД соосных вертолетов, которые были получены в процессе натурных летных испытаний на режимах висения.
В ходе исследований вихревой структуры струи винтов соосного вертолета Ка-32 применялся метод дымовой визуализации: в концах лопасти были расположены малые генераторы дыма. Вихревая струя соосных винтов визуализировалась на висении, малых и средних скоростях полета, вне влияния воздушной подушки (рис. 4, 5). При анализе результатов использовался критерий подобия, определяющий скорости полета и индуктивные скорости струи относительно величины индуктивной скорости идеального винта на висении (рис. 5). Вертикальная скорость концевых вихрей на висении меньше индуктивной скорости идеального одиночного винта. Измеренное поджатие струи составило 0,85R для верхнего винта и 0,91R для нижнего винта (рис. 4).
В поступательном полете была визуализирована вихревая система струи соосных винтов. В передней части винтов свободные концевые вихри находятся над плоскостями вращения верхнего и нижнего винтов. Эта плоская часть вихревой системы может распространяться назад по потоку до 3/4 радиуса винтов (рис. 5).
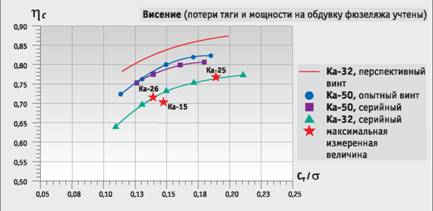
Рис.З. КПД соосных винтов (измерения в летных испытаниях)
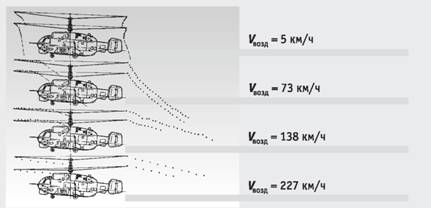
Рис. 4. Боковой вид формы вихревого следа соосного винта для нескольких скоростей полета вне влияния земли
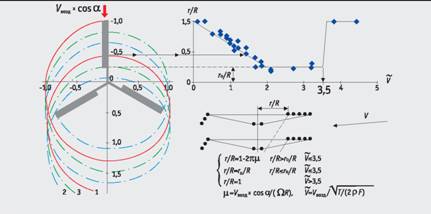
Рис. 5. Положение передней границы вихревого следа по скорости горизонтального полета
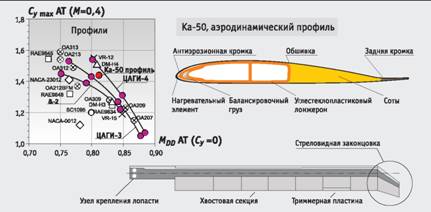
Рис. 6. Аэродинамический профиль лопасти
Применение композитов
В конце 50-х годов на фирме «Камов» были разработаны, изготовлены и испытаны стеклопластиковые лопасти несущего винта. В 1965 г. первые серийные стеклопластиковые лопасти были успешно испытаны на вертолете Ka-15, в 67-м – на Ka-26. В конце 70-х фирма «Камов» разработала стеклоуглепластиковые лопасти винта.
Углеволокно имело модуль упругости в шесть раз больший, чем у всех используемых в то время конструкционных материалов. Это позволило использовать новый материал для решения проблем прочности, устойчивости и аэроупругости конструкции. Использование передовых технологий в работе с материалами определило и геометрию несущего винта вертолета Ka-50. Его лопасти имеют специальный аэродинамический профиль, оптимальную крутку и стреловидную законцовку (рис. 6). Кроме того, все лопасти фирмы «Камов» оснащены электрической противообледенительной системой.
Проводка управления несущим винтом
Движение лопасти «взмах-вращение- шаг» и устойчивость движения лопастей винта определяют параметры проводки управления.
Математическая модель проводки, разработанная фирмой «Камов», используется для проектирования проводки управления и для анализа частот и устойчивости. В модели используется матрица податливости проводки управления, которая была отработана с использованием результатов испытаний натурных соосных вертолетов различных типов (четырех). Данная математическая модель проводки управления и адекватные формулы для «аппроксимации-вычисления» матрично-функциональных элементов были разработаны по результатам экспериментов. Использование формул позволяет без непосредственного физического измерения определить характеристики жесткости агрегатов проводки управления соосных вертолетов рассмотренных типов. Собственные векторы матрицы податливости определяют крутильные формы колебаний всех шести лопастей с учетом конструктивных особенностей проводки управления. Собственные числа матрицы определяют динамическую податливость, которая обычно измеряется в частотных натурных испытаниях.
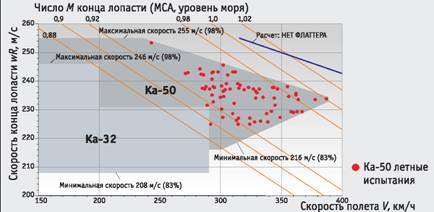
Рис. 7. Диапазон скоростей винтов
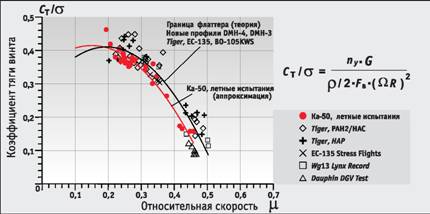
Рис. 8. Граница срывного флаттера
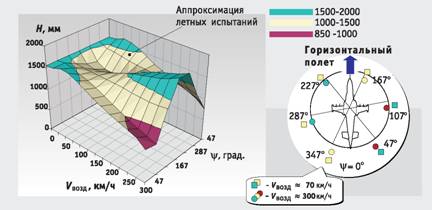
Рис. 9. Расстояние между концами лопастей верхнего и нижнего винтов в зависимости от скорости полета и азимута лопасти
Реализация опыта фирмы в создании боевого вертолета Ка-50
Приемлемый запас по скорости полета до границы флаттера и срывного флаттера был определен способом математического моделирования и подтвержден данными летных испытаний (рис.7, координаты wR-V). На рисунке представлена только часть результатов летных испытаний, а именно, от V=300 до Vmax =350 км/ч и далее до V=390 км/ч. В расчетах флаттер не обнаружен, что подтверждается летными испытаниями (рис. 8). Расчетная граница флаттера показывает, что сравнительно с данными (точками) летных испытаний имеется запас по скорости не менее 50 км/ч (рис.7).
Суммарная переменная сила, приложенная на втулках верхнего и нижнего несущих винтов, возбуждает вибрации корпуса вертолета. Конструкция соосных винтов Ka-50 обеспечивает минимальные переменные суммарные силы на корпусе вертолета, что определяет и низкий уровень вибрации соосных летательных аппаратов, который не превосходит 0,01g на основных режимах полета. При этом маятники на лопастях и антирезонансная подвеска редуктора не устанавливаются.
Специфической для соосного вертолета является задача обеспечения приемлемого расстояния между концами лопастей верхнего и нижнего винтов. Как задача аэромеханики, она аналогична задаче обеспечения зазора между лопастями несущего винта и хвостовой балкой вертолета классической схемы.
На фирме «Камов» использовались как расчетные методы исследования этой проблемы, так и летные исследования. В летных испытаниях с помощью фотооптических приборов расстояние измеряется в каждой из 6 «точек встречи», в которых лопасти верхнего винта оказываются над лопастями нижнего винта при их относительном вращении с удвоенной угловой скоростью.
На рис.9 показана механика явления сближения концов лопастей. На режиме висения плоскости концов лопастей верхнего и нижнего винтов параллельны. Расстояние между ними несколько больше конструктивного расстояния между втулками винтов (H0).
В поступательном полете возникают переменные по азимуту воздушные силы, которые вызывают маховое движение лопастей. Вследствие этого в продольном направлении плоскости концов лопастей верхнего и нижнего винтов наклоняются на равные углы, оставаясь параллельными, в направлении скорости полета (вперед или назад). В поперечном направлении плоскости концов лопастей наклоняются навстречу друг другу вследствие противоположного направления вращения лопастей верхнего и нижнего винтов (рис.9).

Рис.10. Измеренные расстояния между концами лопастей верхнего и нижнего винтов
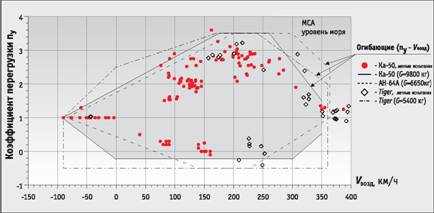
Рис. 11. Зависимость коэффициента перегрузки от скорости полета
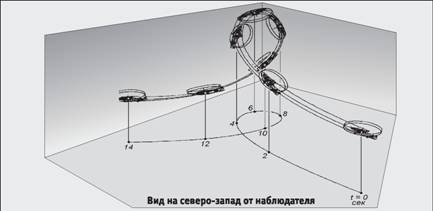
Рис. 12. Траектория полета при косой петле (правой)
Поэтому на одной стороне диска расстояние между плоскостями концов лопастей уменьшается, а на противоположной – увеличивается. В поперечном направлении угол наклона плоскости концов лопастей примерно равен углу взмаха лопасти (влево/вправо) и зависит от режима полета (рис.9). Как известно из аэромеханики, существуют зависимости между маховым движением лопасти и параметрами винта, особенно числом Локка, углом геометрической крутки лопасти и крутильной жесткостью лопасти и жесткостью проводки управления.
Расчеты и результаты летных испытаний определили значения параметров соосных винтов, упомянутые выше, которые гарантируют приемлемое безопасное расстояние между концами лопастей.
На рис.9 показаны измеренные в ходе летных испытаний вертолета Ка-50 углы махового движения концов лопастей в сравнении с расчетными данными.
Обобщенные результаты измерений для горизонтального полета и маневров вертолета Ка-50 представлены на рис.10, 11.
Приемлемые расстояния между концами лопастей соосного винта были определены методом математического моделирования, подтверждены результатами летных испытаний для всего утвержденного перечня маневров и успешно обеспечиваются в ходе эксплуатации вертолета.
Зависимость «перегрузка/скорость полета» для вертолета Ka-50 была рассчитана и подтверждена результатами летных испытаний как в пределах эксплуатационных ограничений (тангаж, крен, частота вращения винта, нагрузки на лопастях), так и в пределах специальных ограничений акробатического пилотажа.
Точками на рис.11 представлена часть результатов летных испытаний, а именно: для 2<nf<3,5 и для ny »0.
Каждая точка отражает результат одного из выполненных маневров. Большая часть точек показана на рис.8. Как видно, превышения установленных ограничений в ходе испытаний не были обнаружены.
На рис.8 все данные представлены в сравнении с данными летных испытаний вертолета Tiger.
На рис. 11 показана зависимость коэффициента перегрузки от скорости полета после «косой петли» (ny~ 3,5).
Программное обеспечение NSTAR, совместимое с аппаратурой летных испытаний и со штатными бортовыми магнитными регистраторами, было создано для обработки и анализа данных о полете вертолета Ka-50. При использовании записей, сделанных испытательной контрольно-измерительной аппаратурой вертолета, программное обеспечение NSTAR позволяет восстановить траекторию маневра и вычислить дополнительные значения параметров полета. Так, на рис.12 показан пример восстановления траектории «косой петли».
Результаты, полученные при работе системы NSTAR, могут быть использованы в процессе обучения пилотов (анализ действий и оказание помощи), для контроля ограничений критических параметров и в качестве входных данных для математического моделирования.
Сегодня можно с уверенностью сказать, что продукция фирмы «Камов» является действительно уникальной. Во- первых, фирма продолжает оставаться единственной в мире, конструирующей летательные аппараты соосной схемы. Во-вторых, современные летательные аппараты типа Ка-50 создаются с использованием новейших передовых технологических и конструктивных решений.
Борис БУРЦЕВ, Сергей СЕЛЕМЕНЕВ, Виктор ВАГИС, фирма «Камов»
ПРОЕКТИРОВАНИЕ
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК