1.2. Противоминные необитаемые морские аппараты
1.2. Противоминные необитаемые морские аппараты
Анализ военных противостояний на арене Мирового океана двух последних столетий наглядно демонстрирует тот факт, что развитие морского минного оружия напрямую связано со степенью развития, состоянием и боеспособностью военно-морского флота конкретной страны. Очевидно, что чем больше страна уступает противнику в качестве и количестве военно-морских судов, тем больше она старается скомпенсировать это отставание за счет развития других областей вооружения, одной из которых является минное оружие. При этом тактически грамотное использование морских мин (в том числе внезапность и скрытность их установки) может существенно влиять на ход боевых действий.
В этой связи, поиск мин и минных заграждений противника является одной из важнейших задач для ВМС США. При этом, ввиду сложности таких операций и требований по скрытности их проведения, здесь также нашли широкое применение необитаемые подводные аппараты. Современные нормативы на скрытый поиск мин составляют 7–10 суток [8].
Скрытный поиск минных полей предполагает использование НПА, которые доставляются (или, в перспективе, самостоятельно выходят) в район проведения операции (скажем, высадки сухопутного десанта), и обследуют его, собирая оперативную информацию о расположении мин. В качестве примера такого комплекса можно привести систему долгосрочной минной разведки (англ. Long-Term Mine Reconnaissance System — LMRS) — комплекс скрытого применения, включающий в свой состав НПА, позволяющие обеспечить заблаговременную, быструю и точную разведку потенциально опасных районов на предмет выявления и картографирования минных полей (обследуемая площадь — 35?50 квадратных морских миль в день). Предполагается применение системы LMRS для поддержки операций сил специального назначения, войсковых операций (десантных), а также для обеспечения безопасности перемещения гражданских и военных судов.
В базовый состав системы включены два необитаемых подводных аппарата AN/BLQ-11 с диаметром калиброванной части 533 мм, и телескопический манипулятор (длина манипулятора равна 18 м, вес — примерно 1600 кг). Общий вид манипулятора в выдвинутом состоянии приведен на рис. 26.

Рис. 26. Манипулятор системы LMRS [22].
Сами аппараты и их корабельное оборудование на период выполнения боевой задачи размещаются на стеллажах торпедного отсека атомных подводных лодок типов «Los Angeles» и «Virginia», что уменьшает их боекомплект на 8–10 единиц оружия [17]. В состав корабельного оборудования входят: устройство для обеспечения выхода и возвращения НПА через торпедные аппараты, системы сбора, обработки и отображения данных, системы связи между НПА и носителем, а также запасные источники энергии. Для возвращения НПА используются два торпедных аппарата одного борта. В верхнем торпедном аппарате размещается телескопический манипулятор, который захватывает НПА и направляет его в нижний торпедный аппарат. Захват НПА телескопическим манипулятором и действия по его возвращению в торпедный аппарат происходят в несколько этапов.
Сначала манипулятор выдвигается вперед из верхнего торпедного аппарата на всю длину. Затем его передняя часть разворачивается гидроприводом на некоторый угол так, чтобы ось причального конуса стала параллельно диаметральной плоскости подводной лодки. Аппарат, двигаясь вдоль борта подводной лодки с кормы в нос, по команде выдвигает свою причальную штангу. Управляясь по данным гидроакустической системы приведения (ее антенны находятся рядом с причальным конусом), НПА попадает своей причальной штангой в конус манипулятора и жестко фиксируется в нем. Далее телескопический манипулятор направляет НПА в нишу открытого торпедного аппарата кормой вперед и проталкивает его в трубу. Обобщенная схема работы системы LMRS приведена на рис. 27.
В настоящее время НПА типа AN/8LQ-11 имеет два типа источника энергии: серебряно-цинковую аккумуляторную батарею (обеспечивается автономность 16 ч) и батарею одноразовых литиевых элементов (обеспечивается автономность 64 ч). Фирма «Sierra Lobo Inc.» (США) разработала для НПА AN/8LQ-11 водородно-кислородный электрохимический генератор (ЭХГ) с криогенным хранением кислорода, который обеспечивает диапазон мощности двигателя от 10 Вт до 10 кВт (обеспечивается автономность 99 ч). Фирмой были соблюдены требования стандартов США по безопасному обращению с кислородом в корабельных условиях. Реагенты (водород и кислород) планируется получать на подводных лодках путем электролитического разложения забортной воды.
Первые испытания системы LMRS были проведены в сентябре 2005 года на борту АПЛ «Оклахома» (SSN 723 «Oklahoma city»).
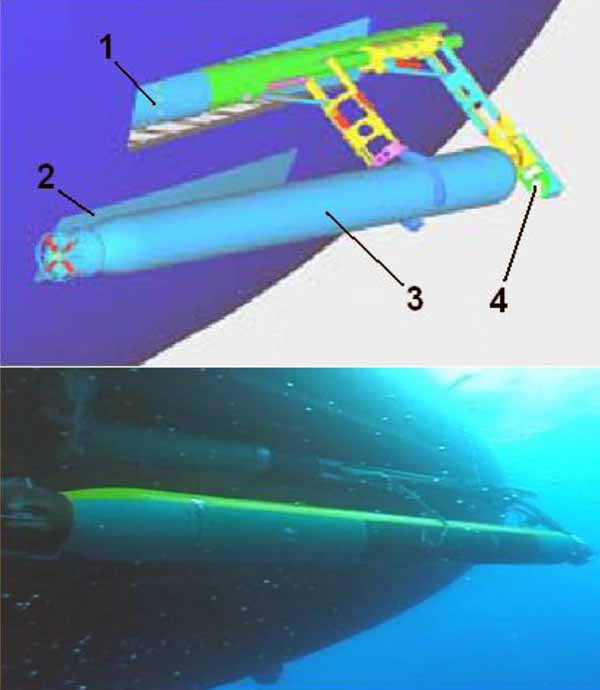
Рис. 27. Действие системы LMRS: 1 — ниша верхнего ТА; 2 — ниша нижнего ТА; 3 — НПА; 4 — манипулятор [23].
В ходе испытаний были опробованы следующие операции:
— выдвижение манипулятора на глубине;
— управление обоими аппаратами с применением бортовой навигационной системы;
— выстреливание НПА из торпедных аппаратов;
— проверка взаимодействия НПА и ПЛ;
— управление аппаратом вблизи лодки.
Процесс погрузки системы на ПЛ приведен на рис. 28.

Рис. 28. Погрузка системы LMRS на АПЛ «Оклахома» через торпедопогрузочный люк.
В январе 2006 года прошли испытания системы на борту подводной лодки «Scranton» (SSN 756) типа «Los Angeles». Программа испытаний предусматривала:
— выстреливание НПА из торпедного аппарата и его подзарядку;
— повторяемые стыковка-отсоединение от системы захвата НПА вблизи от ПЛ;
— управление аппаратом на удалении от подводной лодки;
— возвращение, встреча, управление НПА с подводной лодки при помощи акустической системы связи;
— отработка поворота аппарата на 180° рядом с подводной лодкой;
— проверка полной работоспособности системы в реальных условиях.
Результатом испытаний был первый успешный опыт наведения и стыковки НПА с причальным конусом телескопического манипулятора. Отмечается, что наиболее сложным был процесс управления аппаратом с помощью гидроакустической системы приведения при его нахождении в непосредственной близости от борта подводной лодки.
Необходимо отметить, что противоминные операции, в которых в качестве основных устройств обнаружения мин принимают участие необитаемые подводные аппараты, уже активно проводятся вооруженными силами США.
Наиболее известный аппарат, применяемый для поиска мин, имеет наименование REMUS 100 (название представляет собой аббревиатуру от слов Remote Environmental Monitoring UnitS — устройства для удаленного мониторинга окружающей среды). Данные аппараты активно применялись в ходе разминирования в Ираке в 2003 году (рис. 29). Основная задача REMUS 100 состояла в обследовании заданного района (акватории), обнаружении мин и передачи данных о них операторам. После получения обозначенной информации в места потенциальных минных полей отправлялись специально обученные дельфины для проверки. В случае подтверждения информации, для нейтрализации мин (закладки зарядов и уничтожения), посылались водолазы спецподразделений.

Рис. 29. НПА «REMUS» в операции «Свобода Ираку» (Operation Iraqi Freedom), ручной спуск с борта резиновой лодки.
Программирование НПА REMUS 100 осуществляется с помощью переносного компьютера, для навигации используются радио- и акустические маячки. Встроенный компьютер может сам выбрать оптимальный метод определения маршрута. На рис. 30 представлен аппарат REMUS 100. Его основные параметры приведены в табл. 1.
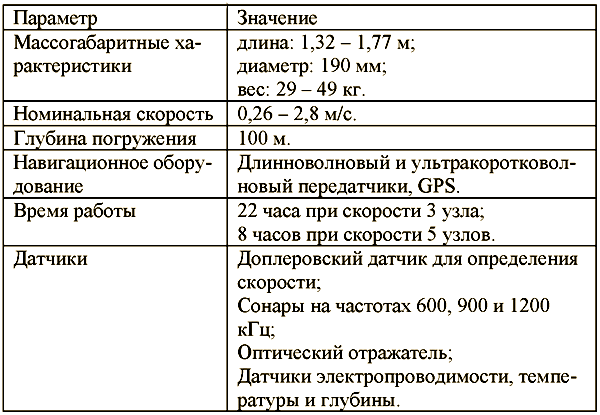
Таблица 1. Основные параметры аппарата REMUS 100.

Рис. 30. REMUS 100.
Также за рубежом разрабатывается большое количество противоминных систем авиационного базирования, включающих в свой состав буксируемые (опускаемые) необитаемые аппараты.
В качестве примера можно привести необитаемый аппарат AN/AQS-20A (рис. 31), который может буксироваться вертолетом или надводным носителем, в том числе ННА. Его система обнаружения мин включает целый ряд датчиков, в том числе датчики бокового обзора (SLS), вспомогательную РЛС для перекрытия мёртвых зон (GFS), акустическую (звуковую) систему поиска (VSS), головную гидроакустическую антенну (FLS) и систему электрооптической идентификации (EOID) [24].
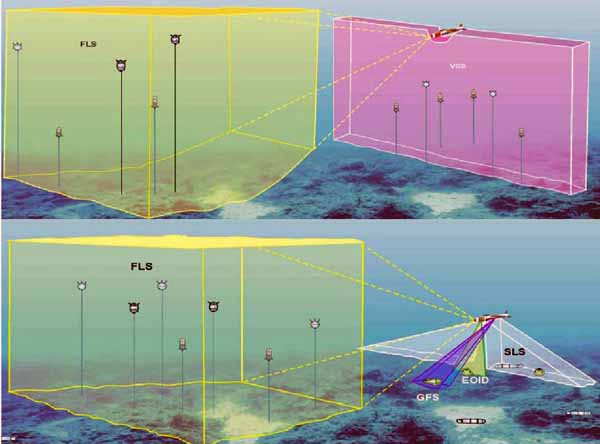
Рис. 31. Поисковые возможности аппарата AN/AQS-20A.
Еще один пример использования в качестве носителя для буксируемых поисковых систем необитаемого надводного аппарата проиллюстрирован на рис. 32. Важным преимуществом подобных систем является отсутствие риска для экипажа носителя, который может возникать не только из-за работы в миноопасном районе, но также и из-за возможного противодействия проведению разминирования со стороны противника.
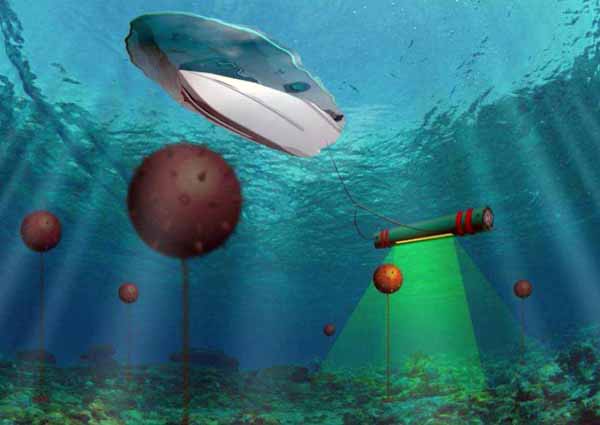
Рис. 32. Поиск мин с применением ННА.
Вообще, можно отметить активное наращивание возможностей по борьбе с морской минной угрозой в ВМС США, причем не только за счет применения необитаемых аппаратов. Это вызвано тем фактом, что, начиная с 1950 года, было уничтожено или повреждено 18 боевых кораблей американских ВМС, причем 14 из них — в результате подрыва на минах. Стоимость этих мин оценивается в 11,5 тыс. долларов, тогда как ущерб, причиненный США, составил несколько десятков миллионов долларов [25].
Приведенные в настоящей главе в качестве примеров системы представляют собой только небольшую часть зарубежных разработок, направленных на создание нового класса необитаемых боевых подводных роботов, способных эффективно противодействовать образцам подводного вооружения и военной техники, созданным в XX веке.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
«Морские» броневики
«Морские» броневики Свои броневые автомобили имелись и у русских моряков. Инициатором появления броневых машин на вооружении флота являлась Комиссия по вооружению сухопутного фронта Морской крепости Императора Петра Великого (город Ревель). Еще 14 декабря 1914 года она
Минные и противоминные действия русского флота при обороне Порт-Артура в 1904 г.
Минные и противоминные действия русского флота при обороне Порт-Артура в 1904 г. В книге на основании архивных материалов рассказывается о минной войне на море у Порт-Артура в 1904 г, о минно-заградительных и противоминных действиях русской эскадры и японского
«Морские Гладиаторы»
«Морские Гладиаторы» В 1935 году Королевский ВМФ сформулировал требования к палубному самолету общего назначения, который мог бы быть разведчиком, истребителем, а также легким бомбардировщиком. В соответствии с этими требованиями появился самолет Блэкберн «Скуа».
Зарубежные противоминные тралы периода второй мировой войны
Зарубежные противоминные тралы периода второй мировой войны Семен Федосеев Вверху: пехотный танк Мк II «Матильда» с бойковым тралом «Скорпион I» в Северной Африке. Снятый капот бортовой установки позволяет увидеть дополнительный двигатель привода ротора. На корме танка
«Морские волки» из стали
«Морские волки» из стали Американские атомные подводные лодки типа "Сивулф"Владимир ЩербаковФотографии предоставлены компанией «Дженерал Дайнэмикс Электрик Боут» и ВМС США.Год назад, 5 июня 2004 г., на верфи американской компании «Электрик Боут» была спущена на воду ПЛА
10"/ 50 морские пушки
10"/ 50 морские пушки Первые четыре 10"/50 орудия были изготовлены на заводе Виккерса для крейсера "Рюрик". Кроме того, в 1911- 1915 годах ОСЗ изготовил 4 орудия взамен расстрелянных для "Рюрика". И наконец, в 1917 году для крейсера на ОСЗ было заказано еще два орудия, готовность которых
Авиационные морские мины
Авиационные морские мины Не совсем обычное сочетание «авиационная» и «морская» у некоторых вызывает недоумение, но при ближайшем рассмотрении оно оказывается вполне логичным и оправданным, поскольку наиболее точно выражает назначение оружия и средства его применения.
Циммерит и другие противоминные покрытия
Циммерит и другие противоминные покрытия Защитная пастаВ1943 году немецкая химическая промышленность разработала особое покрытие — пасту с антимагнитными свойствами. Ее наносили толстым слоем на танковую броню, и она затвердевала на ней шероховатой коркой. Это средство
1.1. Противолодочные необитаемые морские системы
1.1. Противолодочные необитаемые морские системы Как справедливо отмечается в ряде зарубежных публикаций, с учетом современного развития разведывательных спутниковых и авиационных систем, позволяющих получать подробнейшие снимки земной поверхности, подводный флот в