1.1. Противолодочные необитаемые морские системы
1.1. Противолодочные необитаемые морские системы
Как справедливо отмечается в ряде зарубежных публикаций, с учетом современного развития разведывательных спутниковых и авиационных систем, позволяющих получать подробнейшие снимки земной поверхности, подводный флот в случае начала боевых действий может оказаться единственным средством, способным осуществить ответный удар. Таким образом, само по себе это обстоятельство, совместно с фактом наличия в составе ВМС страны подводных сил является серьезным сдерживающим фактором при возможном планировании против нее агрессии.
Однако, развитие необитаемых морских систем, которые позволят осуществлять оперативный поиск подводных лодок противника, их сопровождение и выведение их из строя (путем уничтожения или повреждения их жизненно важных узлов, например гребных винтов) существенно изменяет существующий баланс сил и ставит под сомнение возможность обеспечения ответных действий подводными лодками.
В качестве подобной системы, предназначенной для обеспечения противолодочных действий, можно привести разрабатываемую компанией «Electric boat» концепцию развертывания на базе подводных лодок типа «Огайо» сетевой системы устойчивого прибрежного подводного наблюдения (англ. Persistent littoral undersea surveillance system, networked, сокращенно — PLUSNet). Общий состав такой системы приведен на рис. 16, а конфигурация отдельных модулей — на рис. 17 и 18. Как можно видеть, в состав системы входит большое количество НПА разных типов, в том числе НПА-глайдеры (планеры), практически бесшумно перемещающиеся в воде за счет планирования, достигаемого изменением их плавучести.
Полуавтономная контролируемая сеть донных и подвижных датчиков PLUSNet должна обеспечивать на тактическом уровне и уровне окружающей среды повышение качества обнаружения, классификации, локализации и сопровождения малошумных дизель-электрических ПЛ в мелководных районах западной части Тихого океана [15].
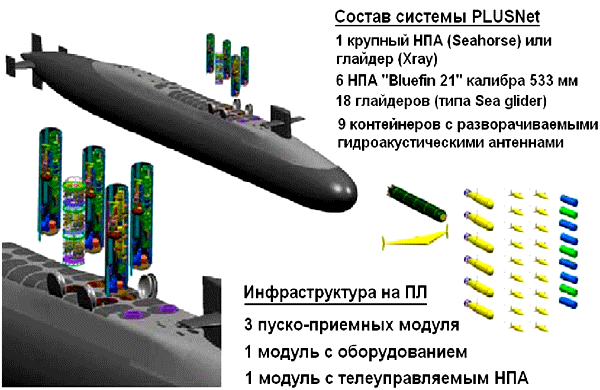
Рис. 16. Общая структура системы PLUSNet.
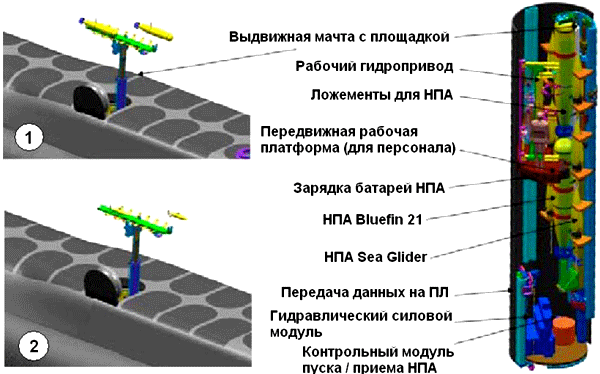
Рис. 17. Применение ракетных шахт для размещения НПА Bluefin 21 и Sea Glider: 1 — пуск / прием НПА Bluefin 21; 2 — пуск / прием НПА Sea Glider.
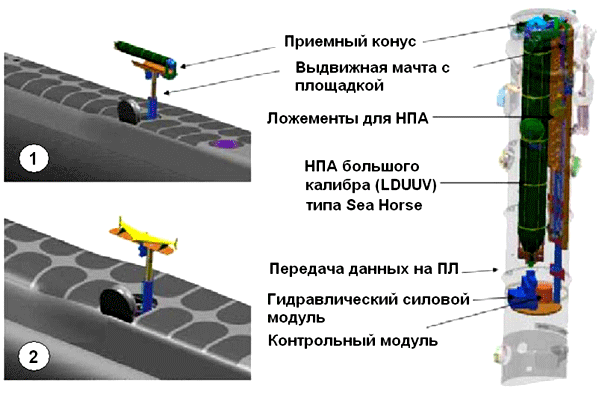
Рис. 18. Применение ракетных шахт для размещения НПА Sea Horse и Xray: 1 — пуск / прием НПА Sea Horse; 2 — пуск / прием НПА Xray.
При этом одной из основных задач системы PLUSNet разработчиками заявляется «подготовка места боестолкновения», в том числе оперативное получение информации об особенностях распространения акустических сигналов в целях более точного обнаружения лодок противоборствующей стороны. Небезынтересно отметить, что в «западной части Тихого океана» расположены три основных страны, не являющиеся военными союзниками США, и имеющие в составе ВМС дизель-электрические ПЛ — Россия, Китай и КНДР.
Еще одна характерная иллюстрация разработки необитаемых аппаратов в целях борьбы с подводными лодками приведена в документе Министерства Обороны США, определяющем развитие необитаемых аппаратов до 2036 года (FY 2011–2036 Unmanned Systems Integrated Roadmap) [16]. В начале документа рассматриваются разные варианты применения необитаемых аппаратов в будущем. Процитируем один из вариантов развития событий с точки зрения американских военных:
«…Место событий: северная часть Тихого океана, прибрежный район.
Сложившаяся ситуация: количество и смелость скоординированных, провокационных усилий (в оригинальном тексте не обозначено, по отношению к кому действия являются провокационными, однако, логично предположить, что в американском документе подразумевается их провокационность по отношению к США) властей Республики Оранджландия (в оригинале — Orangelandia) и властей радикальной исламской нации-государства, расположенной в тропических зонах (± 20° широты), увеличились за последние 15 лет. Оранджландия имеет технологии создания и запуска ядерных межконтинентальных баллистических ракет, и несколько радикальных исламских стран также открыто обладают ядерным оружием. Несмотря на то, что роль ядерной энергетики возрастает, нефть остается главным энергетическим ресурсом, хотя получение доступа к нефти западными странами становится все более ограниченным и дорогим.
Сценарий событий: из гавани Молан Республики Оранджландия ночью, незаметно для Западных космических спутников, выходит 50-летняя бывшая советская атомная ПЛ проекта 971 (по западной классификации — класса Акула). Перемещения АПЛ ВМФ Оранджландии всегда тщательно отслеживаются из-за их редкости (меньше десяти выходов в год) и в, первую очередь, из-за статуса Оранджландии как страны-изгоя, имеющей ядерное оружие.
Выход подводной лодки из гавани определяется благодаря работе подводной сети наблюдения, которое отслеживает все перемещения судов в территориальных водах Республики Оранджландия.
Впереди по курсу движения подводной лодки находится ближайший необитаемый подводный аппарат — глайдер, который автономно отделяется от локальной сети необитаемых аппаратов с целью быстрого перехвата подводной лодки. Приблизившись на расстояние около 50 метров к проходящей мимо АПЛ, аппарату удается обеспечить прикрепление буксировочного троса к корпусу лодки, после чего он начинает буксироваться за ней (рис. 19).

Рис. 19. Иллюстрация из документа [16].
При этом, при погружении лодки на глубину, превышающую максимальную рабочую глубину аппарата, он разматывает трос, оставаясь на приемлемой для него позиции близко к водной поверхности. Каждые три часа он всплывает на поверхность и передает краткий отчет о своем местоположении, расходуя при этом малое количество энергии.
Эти отчеты принимаются орбитальным БЛА связи EQ-25, работающим на высоте около 23 000 метров в восточной части Тихого океана. EQ-25 является крайне выносливой воздушной системой, способной работать в течение двух месяцев без подзарядки…».
Не надо обладать закрытыми от простого гражданина знаниями, чтобы понять, какая страна подразумевается американскими специалистами под «Оранджландией».
Для полноты картины развития противолодочных необитаемых аппаратов приведем еще несколько примеров разрабатываемых систем.
Концепция создания необитаемых подводных аппаратов, базирующихся на атомных подводных лодках, начала разрабатываться в научно-исследовательском центре подводной войны ВМС США (англ. Naval Underwater Warfare Center — NUWS) еще с 1996 года [17].
Разрабатываемые в рамках указанной концепции подводные аппараты получили наименование «Manta». Аппаратами данного типа планируется вооружить вторую и последующие АПЛ типа «Virginia», а также многоцелевые атомные подводные лодки перспективных проектов. Эти лодки будут нести четыре разведывательно-ударных НПА, размещенных в носовой части в нишах легкого корпуса «мокрым» способом. Особенностью данного проекта является конформное расположение НПА (оболочка палубы аппарата является частью наружной обшивки легкого корпуса подводной лодки).
Согласно предлагаемой концепции (которую некоторые зарубежные источники характеризуют как «футуристическую»), НПА будет способен решать следующие задачи:
— обнаружение и уничтожение ПЛ, мин и других подводных целей с применением тяжелых и легких торпед, неуправляемых ракет, а в перспективе и высокоскоростных (суперкавитирующих) боеприпасов;
— ведение гидроакустической, радиотехнической и оптоэлектронной разведки;
— установка быстро развертываемых позиционных, мобильных и дрейфующих линейных антенн, низкочастотных гидроакустических излучателей, необслуживаемых подводных датчиков длительного действия и др., а также прибрежных систем обнаружения подводных лодок;
— осуществление широкополосной цифровой звукоподводной связи, управление распределенной сетью датчиков, ретрансляция данных от выдвинутых к побережью систем разведки и обнаружения подводных лодок на корабельные и береговые командные центры и центры тактической поддержки;
— развертывание малогабаритных автономных НПА для решения обеспечивающих и специальных задач;
— сбор гидрологических и океанографических данных, картографирование морского дна в интересах боевого обеспечения действий ПЛ и сил флота.
Определены две концепции создания НПА «Manta». Первая, получившая наименование «Proud conformal», предусматривает постройку НПА длиной 15 м, оснащенного двумя маршевыми движителями, четырьмя подруливающими устройствами, а также бортовым оборудованием управления и энергообеспечения. НПА данного типа будет способен нести полезную нагрузку (разведывательно-ударный модуль) массой до 8 т. В его состав войдут средства гидроакустической, радиотехнической и оптоэлектронной разведки, шесть-восемь малогабаритных, две легкие и две тяжелые торпеды, а также пусковая установка с восемью направляющими для неуправляемых 155 мм ракет.
Вторая концепция, названная «Integrated conformal» (получила также обозначение «Super Manta»), рассматривает возможность создания НПА длиной 25 м. и водоизмещением 90 т., способного нести функциональную полезную нагрузку массой до 14 т. (рис. 20).
Для подтверждения реализуемости концепции, отработки и интеграции необходимых технологий уже создана демонстрационно-экспериментальная модель аппарата, получившая обозначение MTV (Manta Test Vehicle). Ее масса 7,5 т, длина 11 м. Прочный корпус модели собран из трех цилиндрических секций диаметром 533 мм. Средняя (самая длинная) секция состоит из двух частей. В носовой секции размещается полезная нагрузка, в кормовой — аккумуляторная батарея, обеспечивающая работу всех систем, аппаратура управления, электродвигатель постоянного тока и движитель насосного типа. В состав навигационного комплекса входят инерциальная навигационная система, доплеровская ГАС и приемник NAVSTAR. Балластные цистерны выполнены в виде сфер, закрепленных на оконечностях боковых секций, в которых размещена аккумуляторная батарея, обеспечивающая ход модели со скоростью 5 уз в течение 13 ч. Наибольшая скорость MTV — 10 уз. Легкий корпус выполнен из стеклопластика.

Рис. 20. Внешний вид НПА «Manta» в представлении художника. На внешней поверхности аппарата видны ниши для выпуска оружия разных калибров.
Возможные области применения НПА «Manta» нашли свое отражение в Плане развития необитаемых подводных аппаратов, впервые изданном в США 20 апреля 2000 года (рис. 21) [18].
В качестве гибридного необитаемого аппарата, который можно отнести как к подводному, так и надводному классу, можно привести аппарат, получивший наименование ACTUV (Anti-submarine warfare Continuous Trail Unmanned Vessel), что можно перевести как «Противолодочное необитаемое судно непрерывного слежения» [19].
Общий предполагаемый облик аппарата (по состоянию на 2010 год) представлен на рис. 22. В дальнейшем, концепция построения корпуса ННА претерпела изменения, однако общий состав оборудования и назначение остались прежними.
Рис. 21. План использования перспективных подводных аппаратов в ВМС США.
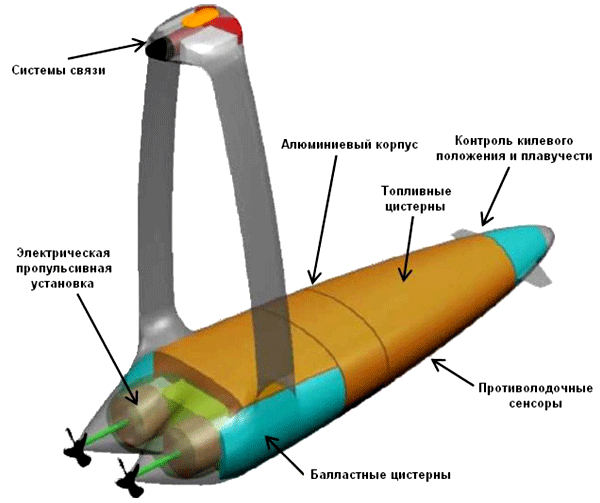
Рис. 22. Общая схема ННА ACTUV.
Общий вес аппарата составит около 157 т. Длина корпуса составит примерно 19 м., при этом корпус судна в рабочем состоянии будет практически полностью погружен под воду, а над поверхностью воды останется только небольшая часть (арка), внутри которой будут расположены системы связи с оператором. Планируется, что судно будет развивать максимальную скорость до 35 узлов при автономности 30 суток.
Интересным фактом является привлечение к работе над созданием системы управления ННА разработчика игр-симуляторов Sonalysts [20].

Рис. 23. Интерфейс программы «ACTUV Tactics».
Представители данной компании разработали специальный тактический симулятор ACTUV Tactics Crowdsourced Simulator, предназначенный для моделирования тактических ситуаций при поиске и преследовании подводных лодок. Этот симулятор был представлен в свободном доступе в сети интернет, откуда его мог использовать любой желающий.
Это было сделано с целью выработки и получения интересных нестандартных подходов и эффективных приемов поиска и обнаружения подводных лодок. При этом игрок, установивший программу на свой персональный компьютер, может дать согласие на использование данных, полученных в ходе игры.
Еще один пример противолодочного необитаемого подводного аппарата являет собой НПА «Proteus» (рис. 24), разрабатываемый компанией Columbia Group.

Рис. 24. Многоцелевой НПА «Proteus».
Согласно данным отдельных источников [21], Proteus имеет длину 7,6 метра, вес около 3 тонн и может передвигаться под водой со скоростью до 10 узлов (около 18 км/ч), при этом запас энергии аппарата позволяет обеспечить его автономное перемещение до 600 км со средней скоростью 5–9 км/ч. Характеристики Proteus позволяют ему выполнять большое количество функций: от патрулирования заданной акватории до практически незаметного слежения за АПЛ, вооруженными межконтинентальными баллистическими ракетами. Аппарат оснащен грузовым отсеком, который может вмещать до 180 кг груза, включая различные датчики, коммуникационное оборудование, взрывчатку и т. п. Также к нему могут прикрепляться мобильная подводная мина MK 67 или торпеды МК 54, что позволяет ему в случае необходимости наносить удар по цели слежения.
Подобные противолодочные аппараты могут эффективно применяться при реализации концепции ВМС США «Держать в риске» (англ. Hold at risk) [4], которая подразумевает готовность к обнаружению подводной лодки противника около известной гавани, с учетом того, что время ее выхода в поход неизвестно (рис. 25). При этом, исходя из возможности господства противника в воздухе вблизи своей гавани, точка доставки необитаемого аппарата осуществляется в стороне от предполагаемой точки погружения лодки после ее выхода из гавани. При этом аппарат заранее перебрасывается в заданный район и находится в ожидании, пока подводная лодка не отойдет от причальной стенки. Основываясь на разведывательных данных о гидрографии портов, аппараты могут быть рассредоточены согласно известным или предполагаемым траекториям движения лодок.

Рис. 25. Концепция «Держать в риске» для наблюдения за подводными лодками.
Приведенные примеры противолодочных необитаемых надводных и подводных аппаратов наглядно раскрывают ту угрозу, которая возникает для российских подводных сил в результате их создания и принятия на вооружение.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Противолодочные, легкие и эскортные авианосцы
Противолодочные, легкие и эскортные авианосцы Хотя во время этих кризисов угроза вражеских подводных лодок не возникала, американский флот в 50-х годах был очень обеспокоен общим ростом угрозы советских подводных лодок, так же как и появлением угрозы со стороны красного
«Морские» броневики
«Морские» броневики Свои броневые автомобили имелись и у русских моряков. Инициатором появления броневых машин на вооружении флота являлась Комиссия по вооружению сухопутного фронта Морской крепости Императора Петра Великого (город Ревель). Еще 14 декабря 1914 года она
Корейские морские пушки
Корейские морские пушки Корейцы предпочитали действовать в китайском стиле, то есть не доводить дело до абордажа, ограничиваясь артиллерийской дуэлью. Технологию изготовления пороха корейцы позаимствовали в 1373 г. у династии Мин. С этого момента в Корее началось
«Морские Гладиаторы»
«Морские Гладиаторы» В 1935 году Королевский ВМФ сформулировал требования к палубному самолету общего назначения, который мог бы быть разведчиком, истребителем, а также легким бомбардировщиком. В соответствии с этими требованиями появился самолет Блэкберн «Скуа».
Противолодочные «Файрфлай» AS.Mk.516
Противолодочные «Файрфлай» AS.Mk.516 Следующей серийной модификацией стал «Файрфлай» Мк.5, в основном подобный FR.4 за исключением оборудования. В отличие от своего предшественника Мк.5 выпускался в трех основных модификациях истребитель-разведчик, ночной истребитель и
Морские школы и инструкторы
Морские школы и инструкторы В 1855 г. в Нагасаки основали первую морскую школу, куда зачислили 38 самураев. К тому времени в княжестве Садзума (Satsuma, Сацума) построили парусник «Шохи-мару» («Sholiei-maru»), на котором и стали учиться курсанты.В 1857 г. правительство открыло в Токио
III . ПРОТИВОЛОДОЧНЫЕ РАКЕТЫ
III . ПРОТИВОЛОДОЧНЫЕ РАКЕТЫ Ракетный комплекс ПЛО РПК-1 «Вихрь»Начало серийного производства американских атомных ПЛ и особенно ПЛ с баллистическими ракетами «Поларис А-1» заставило советское руководство всерьез заняться средствами противолодочной обороны
IV. ПРОТИВОЛОДОЧНЫЕ РЕАКТИВНЫЕ БОМБОМЕТЫ
IV. ПРОТИВОЛОДОЧНЫЕ РЕАКТИВНЫЕ БОМБОМЕТЫ Реактивный бомбомет РБУПервый отечественный реактивный бомбомет (РВУ), разработка которого началась еще в годы Великой Отечественной войны, был принят на вооружение в 1945 году. Разрабатывался он инженерами В. А. Артемьевым и С.Ф.
10"/ 50 морские пушки
10"/ 50 морские пушки Первые четыре 10"/50 орудия были изготовлены на заводе Виккерса для крейсера "Рюрик". Кроме того, в 1911- 1915 годах ОСЗ изготовил 4 орудия взамен расстрелянных для "Рюрика". И наконец, в 1917 году для крейсера на ОСЗ было заказано еще два орудия, готовность которых
Авиационные морские мины
Авиационные морские мины Не совсем обычное сочетание «авиационная» и «морская» у некоторых вызывает недоумение, но при ближайшем рассмотрении оно оказывается вполне логичным и оправданным, поскольку наиболее точно выражает назначение оружия и средства его применения.
Противолодочные ракеты
Противолодочные ракеты Владимир Асанин Американская атомная подводная лодка «Джордж Вашингтон» со стратегическими баллистическими ракетами «Поларис» 15 ноября 1960 г. вышла на первое боевое патрулирование. С этого события началась новая эра в развитии не только
1.2. Противоминные необитаемые морские аппараты
1.2. Противоминные необитаемые морские аппараты Анализ военных противостояний на арене Мирового океана двух последних столетий наглядно демонстрирует тот факт, что развитие морского минного оружия напрямую связано со степенью развития, состоянием и боеспособностью