3.5. Размещение средств ГПД и торпед на НПА-охотниках, подводных лодках и других подводных мобильных носителях
3.5. Размещение средств ГПД и торпед на НПА-охотниках, подводных лодках и других подводных мобильных носителях
Выше в настоящей главе были частично затронуты задачи, решаемые обманными и истребительными СБНА с применением специализированных подводных аппаратов — средств ГПД, торпед, противоторпед и т. п. При этом было отмечено, что размещение подобных аппаратов на носителях (специальных НПА-охотниках и подводных лодках) требует создания отдельных специализированных устройств. В данном подпараграфе будут рассмотрены некоторые технические решения, обеспечивающие базирование оружия на мобильных подводных носителях.
Также подобные системы могут быть использованы и для размещения на носителях других специальных НПА. Достаточно большое количество аппаратов разных назначений может использовать более крупный носитель только в качестве «попутного транспортного средства», позволяющего доставить их в точку начала выполнения самостоятельной операции, после которой их может принять на борт другой носитель. В качестве примера НПА большого водоизмещения, рассчитанного на транспортировку к месту начала работ небольших аппаратов, не имеющих для этого достаточного запаса энергии, можно привести подводный аппарат «Theseus» (рис. 48) [43].

Рис. 48. Расположение малогабаритных НПА в корпусе аппарата «Theseus».
Пусковые установки (ПУ) для размещаемых на мобильных подводных носителях аппаратов должны решать ряд задач, которые не ограничиваются только обеспечением процесса пуска. Процесс самовыхода НПА из ПУ требует увеличенного диаметра пусковой трубы (для обеспечения замещения освобождаемого аппаратом ее объема водой), а также практически полной «остановки» носителя из-за большой вероятности срыва пуска или нежелательного его контакта с корпусом носителя при наличии набегающего потока воды. Все это делает самовыход НПА, базирующихся на мобильных подводных объектах (необитаемых аппаратах или ПЛ) малоэффективным, что приводит к необходимости создания специализированных ПУ, направленных на решение комплекса задач, связанных с размещением аппаратов на носителе и их отделением от него. В данном параграфе будут рассмотрены некоторые существующие подобные системы, а также несколько конструкций, предложенных при участии автора.
Основная проблема отделения НПА от подвижного носителя, заключается в необходимости наличия энергии, достаточной не только для отделения с соблюдением требований по безопасности носителя, но и гарантированного выхода изделия на запрограммированную подводную траекторию его движения [44].
Энергетическая система пусковой установки, решающей эти задачи, содержит: источник энергии, систему ее преобразования и систему формирования во времени необходимой выталкивающей силы. Особенностью подводных ПУ является необходимость создания большой выталкивающей силы при сравнительно малом суммарном расходе энергии. Это накладывает существенные ограничения на выбор рациональных схем энергетических систем пусковых устройств.
Также необходимо отметить, что пусковая установка очень часто является также и местом длительного хранения необитаемого подводного аппарата на борту носителя. Объединенные вместе, НПА и ПУ образуют так называемый транспортно-пусковой контейнер (ТПК), основными задачами которого соответственно являются хранение аппарата в походном положении и его отделение от носителя в нужный момент.
Для создания силового импульса, необходимого для выталкивания аппарата из ТПК, используются разные источники энергии, такие, как пороховые аккумуляторы давления, электричество, гидравлика и так далее. При этом, вид применяемой энергии оказывает существенное влияние на взаимосвязи ПУ и носителя. В большинстве случаев, ввиду ограниченной мощности энергоисточников корабля и большой импульсной мощности ПУ, в их энергосистему необходимо включать автономные источники, иногда накопители энергии [45]. Заметим, что одним из наиболее простых, экологичных, дешевых и легко доступных источников энергии является воздух высокого давления (ВВД). Обычно он хранится в отдельном баллоне, входящем в состав ТПК.
Так как отделение аппарата от носителя может производиться на разных глубинах, то немаловажной проблемой, которую необходимо решить разработчику ТПК, является регулирование выталкивающего силового импульса в зависимости от противодействующего отделению гидростатического давления. При этом ускорения, которые испытывает аппарат в процессе выталкивания из контейнера, не должны превышать определенных границ, определяемых прочностью аппаратуры и устройств НПА. В то же время силовой импульс должен обеспечивать такую выходную скорость аппарата, которая необходима для безаварийного его отделения от носителя и расхождения с ним.
Традиционно при использовании в качестве энергоносителя ВВД обозначенная задача решается путем введения в конструкцию пусковой установки специального пневматического регулятора, изменение проходного сечения которого взаимосвязано с глубиной, на которой необходимо работать. Однако широко применяемые в настоящее время системы, регулирующие закон открытия проходного сечения в зависимости от гидростатического давления окружающей среды, не могут быть применены в разрабатываемых ПУ, прежде всего, из-за массогабаритных характеристик, жесткие требования по ограничению которых диктует малый объем носителей.
В качестве примера разрабатываемых зарубежными специалистами транспортно-пусковых контейнеров, предназначенных для размещения на борту ПЛ малогабаритных НПА (сверхмалых торпед с диаметром калиброванной части 5 дюймов (124 мм) можно привести систему, спроектированную фирмами HDW (Германия) и Whitehead Alenia Sistemi Subacquei (Италия).
Данная система начала разрабатываться с 1998 года для применения торпед типа А200, на базе которых итальянцами к 2007 году было создано 12 видов подводного оружия. Также планируется применение аналогичных сверхмалых торпед «Sea Pike», спроектированных немецкой фирмой «STN Atlas Elektronik». На рис. 49 и 50 приведены продольные разрезы описываемых торпед итальянского и немецкого производства.

Рис. 49. Продольный разрез итальянской миниторпеды А200.

Рис. 50. Продольный разрез немецкой миниторпеды «Sea Pike» [46].
Данная система ТПК предназначается, прежде всего, для противоторпедной защиты подводных лодок. Она получила название «Контейнерные интегрально реагирующие противодействующие средства» (англ. Containerised Integral Reaction Countermeasures Effectors — CIRCE). Предполагается, что эта система, интегрированная в автоматизированную систему боевого управления, будет находиться в постоянной готовности независимо от выполняемых ПЛ задач и не будет накладывать никаких ограничений на перемещения лодки. В настоящее время уже ведется серийное производство системы. Система CIRCE установлена на дизельные ПЛ типов 212 и 212А ВМС Германии и Италии. Кроме того, она производится для ПЛ типов 214 ВМС Греции и 209 ВМС Южной Африки.
За последние несколько лет немецкими и итальянскими исследователями опубликован ряд заявок и патентов, касающихся пусковых установок для малогабаритных торпед [47–50]. Вид одного из пусковых контейнеров, запатентованных фирмой Whitehead Alenia Sistemi Subacquei, представлен на рис. 51 [51].
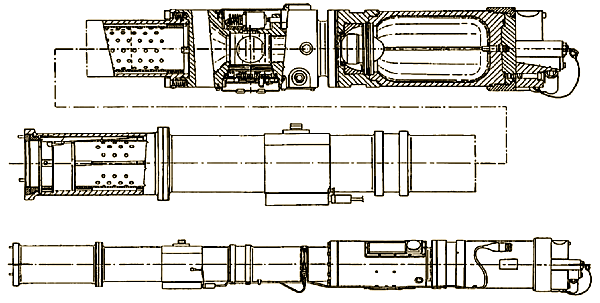
Рис. 51. Разрез и внешний вид итальянского пускового контейнера.
Подобные ТПК, выполненные в виде сменных модулей с оружием различного назначения позволяют формировать номенклатуру оружия (в том числе средств самообороны) на борту применительно к целям конкретного предстоящего боепохода ПЛ [45].
Для удобства расположения в межкорпусном пространстве подводной лодки пусковые установки системы CIRCE сформированы в блоки, выдвигающиеся наружу перед выстреливанием из них оружия.
Внешний вид такого блока представлен на рис. 52, а на рис. 53. показано его размещение на дизель-электрической подводной лодке проекта 212 ВМС Германии и Италии.
Одними из важных являются вопросы размещения ПУ НПА на носителе с обеспечением наибольшей эффективности их работы, а также возможности использования одним носителем аппаратов различных габаритов и назначения. Для решения этих задач может применяться архитектурно — конструктивный метод «выбора взаимозаменяемых модулей на ПЛ» [44]. Этот подход предполагает наличие основного (первого уровня) «стандартизированного объема», который может занимать, например, сменный пусковой модуль с НПА калибра 21 дюйм.

Рис. 52. Блок из 10-ти пусковых установок системы ПТЗ CIRCE.

Рис. 53. Размещение системы CIRCE на ПЛ.
ТПК с аппаратами меньшего калибра могут быть сконструированы как быстро подсоединяемые к системам подводного или надводного носителя с помощью стандартных механических и электрических разъемов модули. Так, например, при горизонтальном размещении модулей и небольших углах наклона к горизонту в межбортном пространстве или ограждении рубки ПЛ определяющим размером является поперечное сечение, что предопределяется максимальным калибром предполагаемого состава НПА.
Таким образом, для размещения модуля первого (рис. 54, а) уровня с учетом конструктивного исполнения требуется объем: X·X·L1, где L1 — длина модуля.
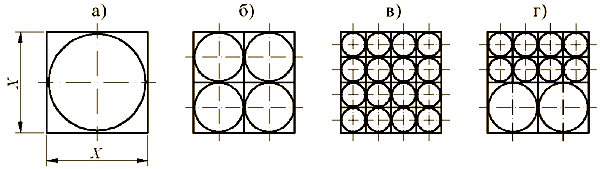
Рис. 54. Архитектурное построение системы забортных модулей оснащения носителя.
На рис. 54 обозначены: а) модуль 1 уровня; б) модули 2 уровня; в) модули 3 уровня; г) комбинированное размещение модулей 2 и 3 уровня. Разделив поперечное сечение на четыре части, получаем ограничения на размеры модулей второго (рис. 54, б) уровня кратности: Х/2·Х/2·L2. Если за модуль первого уровня принят калибр 21 дюйм, то модуль второго уровня будет соответствовать калибру 10 дюймов, а размеры модулей третьего (рис. 54, в) уровня кратности будут соответствовать — Х/4·Х/4·L3 (калибр 5 дюймов).
Реализация такого подхода при проектировании ПУ носителя НПА позволит достичь максимальной гибкости в его эксплуатации, экономии в поставках и строительстве, в темпах усовершенствования и модернизации. Подобная модульная концепция может быть реализована и при размещении ПУ на подводных аппаратах. В частности, аналогичное построение НПА из небольших модулей (которые, при доработке конструкции, могут быть заменены на ПУ) приведено в [18] (рис. 55).
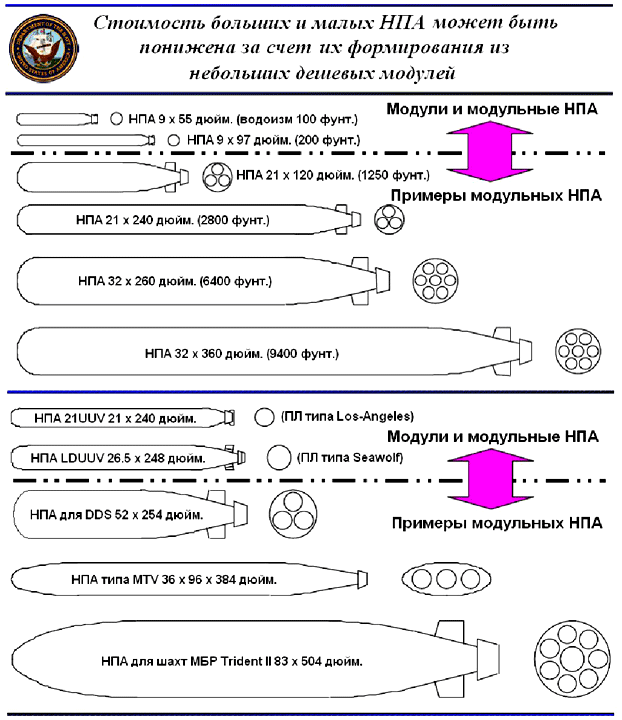
Рис. 55. Предполагаемая схема модульного построения НПА.
Тактико-технические требования к ТПК формируются на основе системного подхода [52], предусматривающего комплексное рассмотрение и учет условий работы ТПК в триаде «НПА — пусковая система — носитель», функционирующей в единой внешней среде.
Системный подход к проектированию пусковых систем предполагает отдельное внимание к разным вопросам, таким как: размещение и хранение НПА на носителе с момента его подачи до момента пуска; обеспечение защиты аппаратов от динамических воздействий, в том числе, от близких взрывов; обмен данными с аппаратом (диалог) в процессах подготовки к пуску и тестирования; защита НПА от воздействия окружающей среды (коррозии) и т. п.
Даже такое краткое и далеко не полное перечисление задач, решаемых элементами ТПК, иллюстрирует большой перечень проблем, подлежащих разрешению проектантами контейнера. Естественно, каждое конструктивно-технологическое решение требуется отработать во всех условиях эксплуатации (или их имитации) [53]. Применяемое при этом экспериментальное оборудование, в том числе и гидродинамические стенды, могут использоваться в дальнейшем при проверке серийной продукции для подтверждения ее соответствия техническим условиям эксплуатации.
Естественно, что основными влияющими на конструктивные особенности ПУ факторами являются условия, в которых должна обеспечиваться их стабильная работа. В качестве примера основных требований к ПУ, можно привести подобные требования к ранее упомянутым пусковым установкам забортного вооружения для ПЛ [54]. Подобные устройства должны удовлетворять следующим требованиям:
1. быстродействие;
2. автономность;
3. стабильность работы вне зависимости от внешних условий;
4. модульность;
5. скрытность применения;
6. минимизация массогабаритных характеристик;
7. технологичность;
8. низкая стоимость.
Быстродействие пусковых установок обуславливается необходимостью незамедлительно реагировать на возникающую угрозу безопасности ПЛ или тактической необходимостью быстрого применения оружия. Исходя из анализа возможных угроз безопасности ПЛ, можно отметить, что время с момента обнаружения и классификации подводного объекта противника до выхода НПА за срез пусковой трубы установки не должно превышать нескольких секунд. Такое ограниченное время предопределяет «мокрое» хранение изделия в жидкостной среде под внешним гидростатическим давлением, так как в данном случае не требуется заполнять внутренний объем пусковой трубы водой и уравнивать давление в ней с внешней средой для производства пуска оружия.
Автономность забортных модулей вооружения диктуется количеством модулей и их расположением. По оценкам специалистов, для достижения достаточной вероятности отражения одной атакующей лодку торпеды, необходимо противопоставить ей до пяти противоторпед малого калибра. Таким образом, для обеспечения нормальной боеспособности ПЛ в условиях ведения современной подводной войны, общее количество средств самообороны и образцов миниоружия (НПА), располагаемых в транспортнопусковых модулях на ее борту, должно быть не менее нескольких десятков единиц. Так как данные модули располагаются вне прочного корпуса ПЛ (возможные места расположения на подводных лодках приведены на рис. 56), одним из важных требований является минимизация их размеров. Это делает практически нецелесообразным создание отдельной энергетической системы для обеспечения пуска изделий, находящихся в модулях, в связи с тем, что подобная система будет занимать дополнительное место и будет сильно разветвлена из-за количества модулей, а кроме того, она должна быть стационарно установлена на ПЛ, что потребует дополнительного обслуживания и контроля за ее состоянием. Исходя из вышесказанного, можно заключить, что энергетику, необходимую для пуска изделия из забортного модуля, целесообразно выполнять индивидуальной и независимой для каждого модуля вооружения, или, в отдельных случаях, общей для отдельной группы модулей.
Установки с автономной энергетикой не должны предусматривать дополнительного управления процессом выстрела из них со стороны персонала лодки или ее боевой информационно-управляющей системы (БИУС). Т. е. при необходимости производства пуска оружия БИУС лодки осуществляет ввод в него необходимых данных и подает сигнал (например, питание на электромагнитный клапан), разрешающий выстрел. При этом основным принципом работы таких установок должно быть положение «выстрелил и забыл», т. е. никаких дополнительных действий, например, по герметизации оставшейся открытой пусковой трубы (для удаления возникающего дополнительно источника гидроакустического шума) не должно производиться.
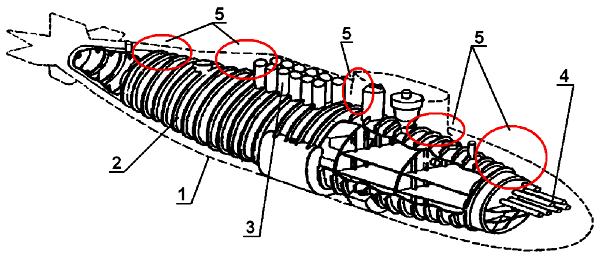
Рис. 56. Обобщенная конструкция современной АПЛ: 1 — легкий корпус; 2 — прочный корпус; 3 — пусковые шахты баллистических ракет; 4 — торпедные аппараты; 5 — места возможного расположения ТПК.
Учитывая вышесказанное, одним из важных требований к забортным модулям вооружения является стабильность их работы вне зависимости от внешних условий. Это требование подразумевает включение в состав каждого модуля специального устройства, обеспечивающего пуск необитаемых аппаратов с выходной скоростью, необходимой для безаварийного его отделения. Если для пуска оружия используется сжатый воздух, подобное устройство может быть выполнено в виде клапана, автоматической регулировкой открытия проходного сечения которого можно регулировать расход воздуха из ресивера, а соответственно, и прилагаемый к изделию силовой импульс, достаточный для достижения требуемой выходной скорости.
Создание подводного миниоружия обусловлено необходимостью повышения боевых возможностей и устойчивости ПЛ с «компенсацией» слабых сторон традиционного оружия большим количеством сверхмалых его образцов. Последнее обстоятельство выдвигает и делает актуальной рассмотренную ранее задачу создания системы сменных взаимозаменяемых забортных модулей вооружения. Реализация такого подхода при проектировании ПЛ позволит достичь максимальной гибкости в ее эксплуатации, экономии в поставках и строительстве, в темпах усовершенствования и модернизации.
Скрытность применения оружия также является одной из необходимых характеристик рассматриваемых пусковых установок. При использовании для пуска изделия энергии сжатого воздуха, скрытность, прежде всего, подразумевает недопущение выхода использованного воздуха вслед за изделием в окружающую среду. Применение для забортных модулей вооружения системы беспузырной торпедной стрельбы (БТС) нецелесообразно, так как это приведет к увеличению объема, занимаемого модулями, дополнительным сложностям при их монтаже и обслуживании, а также к необходимости обеспечивать регулировку их работы в зависимости от параметров движения ПЛ. Для забортных модулей вооружения, не перезаряжаемых во время боепохода ПЛ, наиболее целесообразно применение схемы пневмопоршневой ПУ.
Ранее отмечалось, что минимизация массогабаритных характеристик модулей обуславливается их забортным расположением. Это определяется тем, что объемы, выделяемые для расположения таких пусковых устройств на ПЛ (да и на больших НПА), архитектурно ограничены (рис. 57). Требования по минимизации размеров сменных модулей также ужесточаются исходя из необходимости размещения наибольшего возможного их количества для повышения боеспособности ПЛ. Свою роль играет и потребность расположения модулей в разных частях корпуса лодки для минимизации времени парирования атакующего оружия в зависимости от траектории его движения.
Таким образом, требования по технологичности и низкой стоимости забортных модулей вооружения вытекают из их функционального предназначения. Естественно, что стоимость поставляемого на флот модуля напрямую зависит от сложности его изготовления и используемых материалов. В связи с тем, что количество размещаемых на ПЛ модулей исчисляется десятками единиц, а каждый из них может использоваться в процессе боепохода один раз, их стоимость должна быть на порядок ниже по сравнению с традиционным оружием. Исходя из сказанного выше, использование современных материалов и технологий в производстве пусковых устройств, а также упрощение их конструкций являются приоритетными направлениями проектных разработок.
К числу важных требований также можно отнести:
— безопасность обслуживающего персонала и корабля при штатной работе оборудования и при его отказах;
— минимизация изменений физических полей корабля, что, прежде всего, относится к виброакустическим излучениям, способным демаскировать процесс подготовки и проведения атаки;
— повышение коэффициента полезного действия каждого элемента и комплекса в целом.
Рис. 57. Примеры расположения ТПК в нишах легкого корпуса подводных лодок.
При проектировании пусковых устройств для подводных аппаратов малого калибра также необходимо учитывать тот факт, что, в связи с меньшей по сравнению с традиционным морским оружием длиной, подобные изделия испытывают большие ускорения при одинаковой скорости выхода из пусковой установки. Это делает практически нецелесообразной с точки зрения массогабаритных характеристик изделия реализацию пускового импульса в виде точечного приложения силы (например, при использовании раздвижного толкателя).
Вышеперечисленные требования к пусковым устройствам забортного оружия малого калибра серьезно сужают круг технических решений, применимых при их создании.
Несмотря на то, что работы по созданию подводного оружия малого калибра ведутся в нашей стране уже более десяти лет [46, 55, 56], приходится констатировать факт, что пусковые устройства, предназначенные для его использования, начали разрабатываться лишь недавно. Это привело к отсутствию методик их проектирования, позволяющих обосновывать технические характеристики устройств в зависимости от перечня решаемых ими задач и характеристик оружия, для пуска которого они предназначены.
Ниже в качестве примеров будут приведены несколько конструкций (разработанных с участием автора) подобных транспортнопусковых контейнеров, предназначенных для базирования оружия (торпед, ракет, мин) и необитаемых подводных аппаратов на ПЛ и НПА большого водоизмещения [57–60].
Описываемые ниже конструкции ТПК используют в качестве автономной энергии для выталкивания аппаратов энергию сжатого воздуха. В связи с этим обстоятельством в их конструкциях предусматривается наличие отдельных элементов (регуляторов воздуха высокого давления), управляющих расходом сжатого воздуха в зависимости от глубины, на которой производится выталкивание аппарата. Особенностью первого регулятора является его новый принцип работы, заключающийся в том, что его раскрытие проходного сечения происходит в зависимости от падения давления в полости баллона, а не от времени задержки или гидростатического давления окружающей среды.
Первая из рассматриваемых конструкций транспортно-пусковых контейнеров, позволяющих обеспечить базирование НПА на подводных мобильных носителях и стационарных конструкциях, представлена на рис. 58. На данном рисунке показан ТПК в разрезе, в котором подводный аппарат 1 размещен в пусковой трубе 2, расточенной под поршень 3 и с неподвижно установленным в передней ее части обтюрирующим кольцом 4, образующим с внутренней поверхностью пусковой трубы 2 демпфирующую полость 5. Пусковая труба 2 заполнена жидкостью с добавлением ингибитора (для замедления процесса коррозии) и загерметизирована разрывной мембраной 6. Передняя часть поршня оформлена в виде кольцевого плунжера 7, который формирует по ходу поршня сокращающийся объем демпфирующей полости 5. Вытесняемая жидкость из полости 5 выходит через уменьшающееся сечение, что обуславливает возникновение в ней давления, воздействующего на плунжер 7.
Со стороны пускового устройства к пусковой трубе герметично пристыкована дополнительная секция, корпус 8 которой одновременно является и корпусом баллона с газом (воздухом) высокого давления, с образованием расширительной камеры 9 ограниченной с другой стороны основанием поршня 3.
В расширительной камере размещены пусковой 10 с электромагнитным приводом и основной 11, установленный в корпусе ресивера с выходной магистралью в сторону расширительной камеры, клапаны. В конструкции основной части пусковой трубы для работы поршня 3 установлены упругий кольцевой стопор 12 и упоры 15, под челноки 13 подводного аппарата в поршне выполнены пазы 14.
Можно отметить, что одним из главных достоинств предлагаемой схемы является ее качественное упрощение за счет совмещения ее элементами нескольких функций, что, несомненно, отвечает требованию по повышению технологичности каждого элемента и комплекса в целом. Например, при отказе от устанавливаемых в пусковой трубе направляющих для изделия, применение поршня с простейшим уплотнением в пусковой системе ТПК предусматривает выполнение им следующих функций:
— обеспечивать в походном положении совместно с кольцом обтюрации поперечную и продольную фиксацию изделия, а также его продольное направление при пуске за счет направляющих пазов;
Рис. 58. Схема транспортно-пускового контейнера.
— разделять рабочую (расширительную) полость и полость пусковой трубы;
— обеспечивать герметичность внутренней полости пусковой трубы, заполненной ингибитором и находящейся под забортным давлением;
— исключать прямой контакт с элементами изделия при пуске, что определяет распределение нагрузки по внешней оболочке изделия. Это также обуславливает необходимость увеличения диаметра поршня по отношению к калибру изделия;
— исключать прорыв воздуха из расширительной полости во внешнюю среду с целью соблюдения скрытности применения оружия.
Накладное кольцо обтюрации, располагаемое в передней части пусковой трубы, выполняет следующие функции:
— служит обтюрирующим элементом, участвующим в создании выталкивающего изделие давления в процессе его выпуска и уменьшающим потери жидкости из внутренней полости пусковой трубы;
— совместно с поршнем является направляющим элементом, ограничивающим движение выходящего из пусковой трубы изделия и его перемещения во время хранения;
— совместно с плунжером поршня образует демпфирующую полость, из которой по ходу движения в ней плунжера дросселируется жидкость, вытесняемая поршнем, что приводит к его торможению;
— является базой для размещения и крепления разрывной мембраны.
Предлагаемый подход к формированию облика транспортно-пускового контейнера является реализацией системного взгляда на создание образцов специальной техники, позволяющего комплексно рассматривать взаимосвязи между носителем, пусковым устройством и оружием и реализовывать их в виде структурно организованных конструктивных элементов.
Транспортно-пусковой контейнер работает следующим образом.
После снаряжения ТПК на арсенале и подачи его на носитель, подводный аппарат 1 постоянно находится под давлением внешней среды, располагаясь в жидкости с добавлением ингибитора, которой заправлена полость пусковой трубы 2, ограниченная разрывной мембраной 6 и поршнем 3. При этом фиксация аппарата относительно ТПК осуществляется за счет опоры его калиброванной головной части на обтюрирующее кольцо 4 и челноков 13 хвостовой части на проточки 14 в поршне 3. От продольных перемещений аппарат ограничен с одной стороны кольцевым демпфером 12, а с другой стороны — мембраной 6. Кроме того, продольное (вдоль пусковой трубы 2) перемещение поршня 3 и перемещение относительно него аппарата ограничивается срезными штифтами, которые, как можно заключить из их наименования, в процессе пуска срезаются под действием давления в расширительной камере (полости) 9. От разворота вокруг своей оси аппарат фиксируется за счет расположения челноков 13 в пазах 14 внутренней поверхности поршня 3, взаимодействующего с упорами 15, установленными в расширительной камере 9.
В расширительной камере и внутренних полостях основного клапана находится воздух под атмосферным давлением.
Для осуществления пуска подводного аппарата, после подачи питания на электромагнитный привод пускового клапана 10, начинается истечение газа из баллона 8 в расширительную камеру 9, по достижении в которой давления выше забортного гидростатического и сил сопротивления, поршень 3 начинает перемещаться в пусковой трубе 2, сначала выжимая из нее жидкость через обтюрацию, а, по мере дальнейшего возрастания давления, и подводный аппарат 1. При этом за счет избыточного, по отношению к забортному, давления и выдвижения аппарата 1 мембрана 6 разрывается, освобождая путь для его дальнейшего выхода.
Основной клапан 11 с закономерно увеличивающимся при пуске подводного аппарата проходным сечением открывается при падении давления в ресивере до 0,9–0,95 от начального давления, при этом его проходное сечение составляет 0,6–0,7 от максимального сечения, а полное раскрытие происходит при остаточном давлении в ресивере, составляющим 0,75–0,85 от начального.
Математическое моделирование работы транспортно-пускового контейнера показало, что назначенный начальный объем расширительной полости и установленные моменты срабатывания основного клапана обеспечивают выпуск подводного аппарата в заданном диапазоне глубин с достаточной выходной скоростью.
Следующий вариант реализации пусковой установки для НПА отличается оформлением проходного сечения регулятора газа (воздуха) высокого давления. Предлагается решение, в котором насадка выходной магистрали основного клапана снабжена сквозными каналами связи ее внутреннего объема с зазором между насадкой и внутренней профильной поверхностью втулки, в частности, каналы выполнены виде профильных по длине насадки прорезей.
Такое техническое решение регулятора обуславливает возможность создания единого основного клапана, расположения его привода вместе с пусковым клапаном малого сечения на внешней торцевой поверхности ресивера с отказом от тщательной регулировки пружины, поджимающей основной клапан к его седлу.
Предлагаемая конструкция поясняется следующими эскизами:
— на рис. 59 показано общее устройство контейнера (продольный разрез);
— на рис. 60 представлен вариант оформления проходного сечения регулятора воздуха высокого давления.
Описываемая конструкция предполагает аналогичное предыдущей размещение аппарата в полости пусковой трубы, поэтому более подробно будут рассмотрены элементы, отличные от описанных выше.
Так же, как и в первом примере, к заднему торцу пусковой трубы 2 герметично пристыкована включающая баллон с ВВД 12 секция, образующая расширительную камеру 13. На торцевой, ограничивающей расширительную камеру 13, стенке ресивера 12 размещен основной клапан 14, выходная магистраль которого выполнена в виде насадки 15, свободно находящейся во втулке 16, имеющей профильную внутреннюю поверхность 17 и жестко закрепленной на стенке поршня 3.
В приливе 18 внешнего торца ресивера 12 размещен поршень пневмопривода открывания основного клапана 14. Поршень 19 поджимается пружиной 20. В нем оформлено гнездо 22 системы наполнения ресивера воздухом, связанное каналом 21 с внутренним объемом ресивера 12. Для управления работой пневмопривода предусмотрен пусковой пневмоклапан 23 малого сечения с электромагнитным приводом.
На эскизе пунктиром показан герметичный колпак 24, обеспечивающий транспортную безопасность устройства.
Рис. 59. Схема ТПК.
Возможный вариант конструктивного оформления программного регулятора подачи воздуха из баллона 12 в расширительную полость 13 показан на рис. 60.
Рис. 60. Схема регулятора расхода воздуха — фигурной насадки.
Насадка 15 на выходной магистрали основного клапана 14 имеет фигурные прорези 25, обеспечивающие проход воздуха во внутреннюю полость втулки 16 и расширительную камеру 13.
Пусковая установка работает следующим образом.
На базе приготовления (например, арсенале) через гнездо 22 по каналу 21 в баллон набивается газ (воздух высокого давления). При этом, вследствие разности уплотняемых площадей с приводным поршнем 19, основной клапан 14 будет дополнительно к усилию пружины 20 прижат давлением к седлу, чем обеспечивается надежность герметизации баллона.
После подачи ТПК на носитель на глубине подводный аппарат 1 будет находиться в жидкости с добавлением ингибитора под забортным давлением вследствие малой жесткости мембраны 10.
Осуществление пуска подводного аппарата производится подачей электропитания на привод пневмоклапана 23. Давлением воздуха поршень 19 привода основного клапана 14 перемещает его в открытое положение. Из выходной магистрали воздух поступает во внутреннюю полость насадки 15 и далее по зазору между нею и профилированной поверхностью 17 втулки 16 в расширительную камеру 13, обеспечивая в ней повышение давления выше забортного. Поршень 3, перемещаясь вдоль пусковой трубы и компенсируя потерю воды через обтюрацию, обеспечивает ускоренное по отношению к нему движение подводного аппарата 1, так как площадь поршня 3 больше площади калиброванной части подводного аппарата, находящейся на срезе кольца 4 обтюрации.
В конце разгона подводного аппарата 1 поршень 3 тормозится и затем останавливается, так как плунжер 6 сжимает в демпфирующей полости 5 жидкость, постепенно под образующимся повышенным давлением выжимая ее через уменьшающееся с перемещением поршня сечение во внутреннюю полость пусковой трубы.
По одному из вариантов программное изменение проходной площади регулятора обеспечивается также (рис. 60) за счет профиля прорези 25 в насадке 15 и профиля внутренней поверхности 17 втулки 16, формирующих закономерное увеличение проходной площади регулятора при движении поршня 3.
Таким образом, устройство обеспечивает выпуск подводного аппарата с необходимой для безопасного отделения от носителя скоростью в заданном диапазоне глубин.
В качестве третьего примера транспортно-пускового контейнера приводится схема, разработанная автором. Ее характеризует упрощенная конструкция устройства, а также пониженная величина разброса выходной скорости выпускаемого подводного аппарата в широком диапазоне глубин использования устройства.
Предлагаемая конструкция приведена рис. 61, на котором показано общее устройство ТПК и рис. 62, на котором изображен разрез магистрали основного клапана и расположенного в ней шарового клапана. Также можно отметить, что данная конструкция является развитием описанной выше второй конструкции.
На рис. 61 изображен общий вид конструкции в разрезе, в котором подводный аппарат 1 размещен в пусковой трубе 2, расточенной под поршень 3, с неподвижно установленным в ее передней части обтюрирующим кольцом 4, образующим с внутренней поверхностью пусковой трубы демпфирующую полость 5, по размерам согласованную с кольцевым плунжером 6 поршня 3.
Подводный аппарат опирается головной частью на обтюрирующее кольцо 4, а челноками 7 — на пазы 8. При транспортировке и хранении в продольном направлении перемещение аппарата ограничивают кольцевой буфер 9 и разрывная мембрана 10, которая герметизирует внутренний, заполненный ингибитором объем пусковой трубы 2. Начальная фиксация поршня 3 от разворота относительно его продольной оси обеспечивается упорами 11.
С другой стороны трубы 2 герметично пристыкована включающая баллон 12 секция с образованием расширительной камеры 13. На торцевой, ограничивающей расширительную камеру 13, стенке баллона 12 размещен основной клапан 14, в выходной магистрали 15 которого установлен шаровой клапан 16, взаимодействующий с дистанционно управляемым шаговым электродвигателем 17, изменяющим при вращении его проходное сечение.
В приливе 18 внешнего торца ресивера 12 размещен поршень пневмопривода открывания основного клапана 14. В поджимаемом пружиной 20 поршне 19 привода оформлено каналом 21 связанное с внутренним объемом ресивера гнездо 22 системы наполнения ресивера воздухом. Для управления работой пневмопривода предусмотрен пусковой малого сечения пневмоклапан 23 с электромагнитным приводом.
На эскизе пунктиром показан герметичный колпак 24, обеспечивающий транспортную безопасность устройства.
На рис. 62 изображен разрез магистрали основного клапана и расположенного в ней шарового клапана, на котором обозначены расширительная камера 13, в которой расположена выходная магистраль 15 основного клапана 14, в которой установлен шаровой клапан 16.
Транспортно-пусковой контейнер работает следующим образом.
На базе приготовления через гнездо 22 по каналу 21 в баллон 12 набивается воздух высокого давления. Вследствие разности уплотняемых площадей с приводным поршнем 19 основной клапан 14 будет дополнительно к усилию пружины 20 прижат давлением к седлу, чем обеспечивается надежность герметизации баллона.
Рис. 61. Продольный разрез ТПК.
Рис. 62. Реализация регулятора расхода воздуха.
После установки транспортно-пускового контейнера на носителе и выхода последнего в море, на глубине подводный аппарат 1 будет находиться в жидкости с добавлением ингибитора под забортным давлением вследствие малой жесткости мембраны 10.
Перед осуществлением пуска подводного аппарата 1 производится его подготовка, в ходе которой в него с помощью не показанного на чертежах устройства вводятся данные от информационно-управляющей системы носителя. В это же время по смежному кабелю, также не показанному на чертежах, на шаговый электродвигатель 17 подается напряжение, вызывающее его вращение, передаваемое на шаровой клапан 16, что приводит к изменению его проходного сечения. При этом угол вращения шарового клапана 16 выбирается информационно-управляющей системой исходя из текущего значения глубины погружения носителя. На минимальной глубине шаровой клапан 16 поворачивается так, что его малое проходное сечение обеспечивает малый расход воздуха из баллона 12, подаваемого в расширительную камеру 13. На максимальной глубине шаровой клапан 16 остается полностью открытым, обеспечивая максимальный расход воздуха.
Осуществление пуска подводного аппарата 1 производится подачей электропитания на привод пневмоклапана 23. Давлением воздуха поршень 19 привода основного клапана 14 перемещает его в открытое положение. Через открытый основной клапан 14 воздух высокого давления из баллона 12 поступает в выходную магистраль 15, а далее, через проходное сечение шарового клапана 16, — в расширительную камеру 13, обеспечивая повышение давления в ней выше забортного. При этом на малой глубине погружения носителя забортное давление мало, и поэтому расход воздуха, необходимый для его преодоления, небольшой. На большой глубине — наоборот. Поршень 3 за счет давления в расширительной камере, перемещается вдоль пусковой трубы и компенсирует потерю воды через обтюрацию, тем самым обеспечивая ускоренное по отношению к нему движение подводного аппарата 1, за счет того, что площадь поршня 3 больше площади калиброванной части подводного аппарата, находящейся на срезе кольца 4 обтюрации.
В процессе перемещения поршня 3 давление воздуха в расширительной камере 13, из-за увеличения ее объема, падает, тем самым уменьшая силу, действующую на поршень 3. При этом на малой глубине это падение давления компенсируется небольшим расходом воздуха, а на большой — существенным. Предварительная установка проходного сечения шарового клапана 16 позволяет регулировать расход воздуха в зависимости от глубины погружения носителя, на которой производится выталкивание подводного аппарата 1.
В конце разгона подводного аппарата 1 поршень 3 тормозится и затем останавливается, так как плунжер 6 сжимает в демпфирующей полости 5 жидкость, постепенно выжимая ее под образующимся повышенным давлением через уменьшающееся с перемещением поршня сечение.
Четвертая конструкция транспортно-пускового контейнера приведена здесь для более подробной иллюстрации возможных технических решений, применяемых для решения задачи обеспечения достаточной стабильности величины выходной скорости НПА на разных глубинах использования ТПК.
Описываемая конструкция отличается дополнительным элементом, входящим в ее состав — гидростатом, отслеживающим изменение давления внешней среды. Наличие в составе системы подачи воздуха на срабатывание устройства гидростата обеспечивает более точную регулировку расходуемого воздуха, создающего силовой импульс, прилагаемый к подводному аппарату в зависимости от глубины, что, с одной стороны, уменьшает избыточную величину выходной скорости на малой глубине, а с другой — позволяет максимально использовать проходное сечение клапана на больших глубинах.
На рис. 63 изображен общий вид рассматриваемой конструкции в разрезе. Общее расположение аппарата в пусковой трубе не отличается от ранее описанных. К пусковой трубе 2 герметично пристыкована включающая баллон 12 дополнительная секция с образованием расширительной полости 13. В торцевой, ограничивающей расширительную полость 13, стенке баллона 12 выполнено резьбовое гнездо, в котором герметично закреплена выходная магистраль 14, оформленная в виде трубы. В выходной магистрали расположено веретено 15, имеющее профильную наружную поверхность с уменьшающимся в сторону баллона поперечным сечением, и жестко закрепленное на торцевой, ограничивающей расширительную полость стенке поршня 3.
В задней части баллона находится резьбовое гнездо, в которое ввернута с обеспечением герметичности соединения клапанная коробка 16, предназначенная для размещения пускового и основного клапанов, устройства наполнения баллона и гидростата 17.
Продольный разрез клапанной коробки представлен на рис. 64, при этом на чертеже не показана втулка регулятора проходного сечения выходной магистрали 14, размещаемая в гнезде 18, герметично закрываемом от внешней среды также не показанной на чертеже крышкой.
Внутри клапанной коробки выполнена полость 19, соединенная с внутренним объемом баллона 12 цилиндрическим каналом 20, воздух в которой находится под давлением, соответствующим давлению во внутренней полости баллона 12. С полостью 19 соединены не показанные на чертеже пусковой клапан и устройство наполнения баллона. Также внутри клапанной коробки выполнена полость 21, герметично отделенная от полости 19 основным клапаном 22 и находящаяся до момента пуска аппарата под атмосферным давлением. Полость 21 связана с выходной магистралью 14 с помощью проходных сечений 23, частично перекрываемых втулкой регулятора проходного сечения выходной магистрали 14. В верхней части основного клапана 22 расположена управляющая полость 24, связанная с полостью, в которой расположен пусковой клапан, внутренним каналом 25.
На рис. 65, изображающем разрез А-А, показано устройство гидростата 17, располагаемого в теле клапанной коробки 16, в которой выполнена внутренняя полость 26. Во внутреннюю полость 26 входит поршень 27 гидростата 17, жестко соединенный с зубчатой рейкой 28, выполненной в виде вала с нарезанными на нем зубьями. Во внутренней полости 26, герметично отделенной от наружной среды прочным сильфоном 29, расположена пружина 30, определяющая начальное положение поршня 27, а также закон его перемещения под действием изменяющегося наружного гидростатического давления. Зубчатая рейка 28 взаимодействует с втулкой 31 регулятора проходного сечения, угловое положение которой относительно проходных сечений 23 определяет их эффективную площадь, через которую в процессе выпуска аппарата проходит воздух.
Устройство выталкивания работает следующим образом.
На базе приготовления в баллон 12 набирается газ (воздух высокого давления), а во внутреннюю полость пусковой трубы 2 — жидкость с добавлением ингибитора.
После подачи устройства на носитель на глубине подводный аппарат 1 будет находиться в жидкости под забортным давлением вследствие малой жесткости мембраны 10. При этом по мере увеличения глубины нахождения носителя будет изменяться гидростатическое давление, действующее на поршень 27 гидростата 17, который, перемещаясь внутрь полости 26 и сжимая пружину 30, будет вызвать перемещение зубчатой рейки 28, которая в свою очередь, будет передавать вращение втулке 31, что приведет к увеличению эффективной площади проходных сечений 23. В случае, если носитель всплывает, поршень 27 под действием пружины 30 и жесткости сильфона движется в обратном направлении, вызывая уменьшение эффективной площади проходных сечений 23.
Рис. 63. Общая схема ПУ.
Рис. 64. Разрез клапанной коробки, баллона ВВД выходной магистрали.
Рис. 65. Схема гидростата.
Осуществление пуска подводного аппарата производится подачей электропитания на привод не показанного на чертежах пускового клапана, который открывает доступ воздуха под давлением из полости 19 через внутренний канал 25 в управляющую полость 24 основного клапана 22. При уравнивании давления в управляющей полости 24 и во внутренней полости 19, за счет разности уплотняемых поверхностей, основная ступень регулятора откроется, обеспечивая доступ воздуха высокого давления во внутреннюю полость 21, а из нее — через проходные сечения 23 в выходную магистраль 14.
Из выходной магистрали 14 воздух, через кольцевой зазор между внутренней стенкой магистрали 14 и наружной поверхностью веретена 15, поступает в расширительную полость 13, обеспечивая повышение давления в ней выше забортного. Поршень 3, перемещаясь вдоль пусковой трубы и компенсируя потерю воды через обтюрацию, обеспечивает ускоренное по отношению к нему движение подводного аппарата 1, так как площадь поршня 3 больше площади калиброванной части подводного аппарата, находящейся на срезе кольца 4 обтюрации. Также движение поршня вызывает увеличение проходного сечения, через которое воздух поступает в расширительную полость, за счет вытягивания из выходной магистрали 14 веретено 15, имеющее, в том числе, и конические участки профилированной наружной поверхности.
В конце разгона подводного аппарата 1 поршень 3 тормозится и затем останавливается, так как плунжер 6 сжимает в демпфирующей полости 5 жидкость, постепенно выжимая ее под образующимся повышенным давлением через уменьшающееся с перемещением поршня сечение.
Также можно отметить, что специализированные подводные аппараты (оружие) не обязательно должны располагаться до момента пуска в ТПК.
В качестве примера альтернативной системы расположения НПА на носителе можно привести следующее техническое решение, направленное на размещение оружия (средств ПТЗ) в нишах легкого корпуса (специальных надстройках, «шайбах» хвостового оперения и т. п.) подводных лодок [61].
Предлагаемое устройство приведено на рис. 66, на котором изображен вид на размещаемый в нем аппарат «изнутри» легкого корпуса. Подводный аппарат размещен внутри корпуса носителя на поворотном щите, поворачивающемся относительно осей поворота. Вдоль поворотного щита проложены направляющие для каретки и направляющая для подводного аппарата. Внутри каретки расположена дополнительная направляющая, контактирующая с хвостовой частью аппарата и предотвращающая его вращение относительно собственной оси в процессе его выталкивания. В состав каретки входят два кожуха, внутри которых расположены пружинные приводы, упирающиеся в упорные стойки, жестко закрепленные на поворотном щите. В кожухах выполнены сквозные отверстия, предназначенные для подтока воды и снижения сопротивления движению каретки. Каретка застопорена во взведенном положении резьбовым штифтом, в который упирается один из кожухов. Головная часть подводного аппарата контактирует с контр-направляющей, которая расположена на обтекателе, жестко закрепленном на корпусе носителя.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Эра подводных ракетоносцев
Эра подводных ракетоносцев Проведя более 20 лет в ядерном подводном противоборстве и сделав два мощных витка в гонке вооружений, США и СССР создали стратегические и многоцелевые атомные подводные лодки и приступили к еще более мощному - третьему витку. И та, и другая
Участие подводных лодок в войне с Японией
Участие подводных лодок в войне с Японией К концу лета 1905 г. во Владивостоке оказалось 13 подводных лодок. Качества этих лодок не отвечали условиям дальневосточного театра военных действий. Общим их недостатком была малая дальность плавания. Рассматривая лодки только с
Модернизация подводных лодок «Окунь» и «Макрель»
Модернизация подводных лодок «Окунь» и «Макрель» Подводная лодка «Окунь» после модернизации. Либава 1910-е пПо первоначальному проекту подводные лодки типа «Касатка» должны были быть трехвинтовыми, но так как в 1904 г. для них не нашлось подходящих двигателей, то бортовые
Окраска японских подводных лодок
Окраска японских подводных лодок Все субмарины императорского флота Японии изначально были окрашены в темно-серый цвет. На бортах рубок наносились номера, иногда номера в целях секретности закрашивались или драпировались тканью. Нередко на рубках рисовали
Документ № 2.2 Выписка из «Учета плавания кораблей бригады подводных лодок КБФ по месяцам» (Приложение к «Отчету по штурманской специальности бригады подводных лодок КБФза период военных действий в 1941 г.»)
Документ № 2.2 Выписка из «Учета плавания кораблей бригады подводных лодок КБФ по месяцам» (Приложение к «Отчету по штурманской специальности бригады подводных лодок КБФза период военных действий в 1941 г.») Подводная лодка М-96 ОЦВМА. Ф. 18. Д. 712. Л.
Документ № 3.7 Выписка из Таблицы № 1 «Плавание подводных лодок 2-го эшелона за боевые походы» – приложения к «Отчету о боевой деятельности подлодок 2-го эшелона бригады подводных лодок КБФ с 9.08 по 19.10.1942 г.»
Документ № 3.7 Выписка из Таблицы № 1 «Плавание подводных лодок 2-го эшелона за боевые походы» – приложения к «Отчету о боевой деятельности подлодок 2-го эшелона бригады подводных лодок КБФ с 9.08 по 19.10.1942 г.» ОЦВМА. Ф. 18. Д. 40017. Л.
Количественный состав Подводных Сил и классификация подводных лодок ВМФ СССР
Количественный состав Подводных Сил и классификация подводных лодок ВМФ СССР К началу Великой Отечественной войны в составе Военно-Морского Флота СССР находилось 212 подводных лодок, которые в зависимости от надводного водоизмещения делились на четыре класса: малые
Первые ракеты для подводных лодок
Первые ракеты для подводных лодок Сейчас флот, в том числе подводные силы, невозможно представить себе без ракетного оружия.А первые работы над таким оружием проводили немцы во время второй мировой войны.В 1942 году по инициативе доктора Штейнхофа, работающего на
Против подводных диверсантов
Против подводных диверсантов На Камчатке отряд специального назначения бригады кораблей охраны водного района продолжает совершенствовать свое мастерство по борьбе с подводными диверсантами и средствами (ПДСС)Отряд специального назначения бригады кораблей охраны
ОХОТА ЗА ТЕНЯМИ ПОДВОДНЫХ ЛОДОК
ОХОТА ЗА ТЕНЯМИ ПОДВОДНЫХ ЛОДОК С началом боевых действий в 1950 г. самую большую угрозу для Седьмого флота США и флотов их союзников могли представлять советские подводные силы на Тихом океане. В первые дни войны главком ВМС США в зоне Тихого океана определял общее