3.3. Захватывающие системы борьбы с необитаемыми аппаратами
3.3. Захватывающие системы борьбы с необитаемыми аппаратами
Захватывающие СБНА являются очень перспективными, так как они позволяют получать информацию о разработках противника, а также использовать захваченные аппараты в своих целях. В настоящее время (по сведениям, доступным в печати) подобные системы еще находятся только в начальной стадии активной разработки.
Ярким примером использования подобных систем против воздушных необитаемых аппаратов может служить случай, описываемый ниже.
4 декабря 2011 года недалеко от города Кашмер (северо-восточная часть Ирана) иранскими вооруженными силами был захвачен американский беспилотный летательный аппарат-разведчик RQ-170 Sentinel производства компании Lockheed Martin [35]. БЛА этого типа изготавливаются с применением технологии «стэлс», а их характеристики являются строго секретными. При этом до конца 2009 года само существование таких аппаратов отрицалось представителями вооруженных сил США.
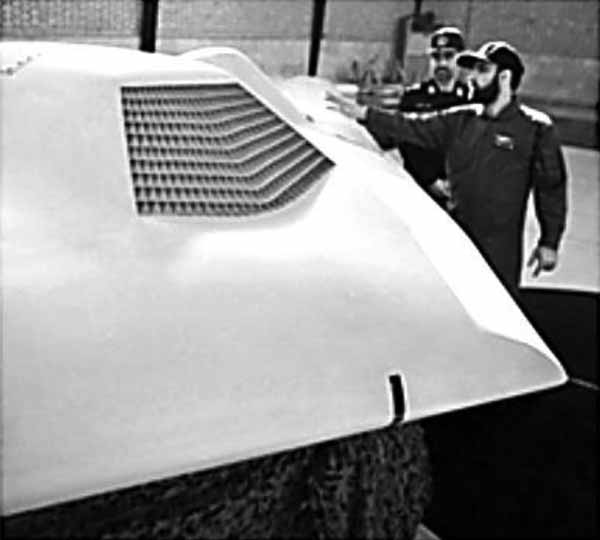
Рис. 42. Иранские военные осматривают захваченный БЛА.
Захват БЛА-«невидимки», вошедшего в воздушное пространство Ирана со стороны Афганистана для слежения за иранскими ядерными объектами, был произведен без применения средств ПВО. Как сообщалось позднее, операция осуществлялась с применением обычных средств радиоэлектронной борьбы (согласно некоторым источникам [36], для этой цели был применен российский комплекс исполнительной радиотехнической разведки (ИРТР) 1Л222 «Автобаза»). С их помощью был разорван канал спутниковой связи между БЛА и наземными операторами, располагающимися на территории США. Такая ситуация учтена в программе управления аппарата, которая переводит его в режим автоматического полета по программе возвращения на базу. При этом для определения места положения БЛА используется сигнал системы GPS. Иранские специалисты подменили данный сигнал на другой, согласно которому, текущее местоположение аппарата соответствовало территории Афганистана. Автопилот «беспилотника» посчитал, что он прибыл на базу и совершил посадку на территории Ирана, получив незначительные повреждения шасси из-за разницы в высотах над уровнем моря аэродрома базирования и местности, на которую было совершено приземление.
В апреле 2012 г. представители армии стражей исламской революции объявили о том, что информация, полученная аппаратом в процессе эксплуатации и сохраненная в его бортовом журнале, была ими полностью расшифрована. Также было объявлено о том, что в настоящее время иранские инженеры работают над созданием аналога БЛА, а его конструктивными особенностями интересовались представители технических разведок ряда стран, в том числе России и Китая.
Интересно также отметить, что уже в феврале 2013 г. Иран продемонстрировал свой новый истребитель-бомбардировщик Qaher-313, построенный по технологии «стэлс». Согласно заявлению Министра обороны Ирана, «…Qaher-313 является полностью отечественным самолетом, разработанным и построенным нашими авиационными экспертами. Он может уклоняться от радаров и летать на очень низких высотах, нести на борту вооружение, атаковать самолеты противника и садиться на коротких взлетнопосадочных полосах…» [37].
Если рассматривать возможные технические решения, позволяющие обеспечить пленение (захват) необитаемых морских надводных и подводных аппаратов, нельзя пройти мимо такого простого и многократно испытанного средства, как сети, которые позволяют надежно зафиксировать схваченный аппарат.
Эффективность сетей, особенно при их применении против аппаратов с собственным движителем (винтом) многократно подтверждалась на практике, в том числе и во время Второй Мировой войны, в ходе которой противолодочные сети (рис. 43) нашли широкое применение. В качестве примера можно вспомнить блокаду немецким флотом подводных лодок Краснознаменного Балтийского флота в Финском заливе, во время которой залив был перегорожен противолодочными сетями в наиболее узкой его части, между островом Нарген и полуостровом Порккала-Удд.
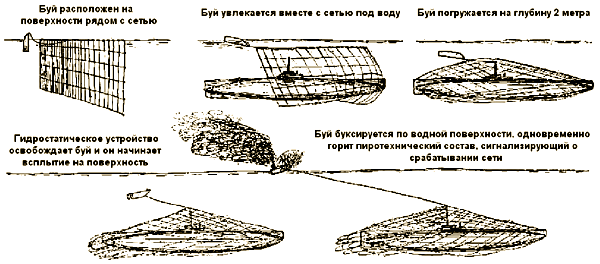
Рис. 43. Использование противолодочных сетей [36].
Одним из последних примеров запутывания достаточно массивного аппарата в подводных сетях может служить случай, произошедший в августе 2005 г. у берегов Камчатки.
4 августа спасательный глубоководный аппарат проекта «Приз» АС-28 выполнял учебное погружение в бухте Березовой в 75 километрах к югу от Петропавловска-Камчатского и на глубине около 190 метров запутался в обрывках рыболовецких сетей и тросах антенны глубоководного гидроакустического комплекса. Самостоятельно выпутаться из сетей аппарату не удалось, в связи с чем для спасения 7-ми членов экипажа была организована специальная операция, в которой приняли участие водолазные специалисты из России, США, Великобритании и Японии, которым удалось 7 августа с применением телеуправляемого НПА освободить аппарат из сетей, после чего он благополучно вернулся на поверхность [38].
Отметим, что рыболовные сети никак специально не проектировались для захвата аппарата, имеющего подводное водоизмещение 110 т, и следующие размеры корпуса: макс. длина — 13,54 м; макс. ширина — 3,8 м; макс. высота — 5,7 м. Однако даже таких сетей оказалось достаточно для пленения аппарата, по размерам сопоставимого с разрабатываемым НПА «Manta»!
Еще один возможный вариант захвата аппаратов особенно хорошо применим к НПА-глайдерам, использующим эффект планирования, при котором подводный аппарат погружается или всплывает по пологой, не обязательно прямолинейной, траектории, позволяющей ему перемещаться в заданном направлении только за счет сил, действующих на него со стороны морской среды. Изменение плавучести глайдеров, как правило, обеспечивается путем изменения значения их осредненной плотности [39]. Например, глайдер может изменять свою плотность, передвигая вперед-назад маленький поршень, который будет соответственно увеличивать или уменьшать его объем. Так как плотность любого объекта может быть вычислена путем деления его массы на его же объем, а масса объекта при перемещении поршня остается постоянной, то задача сводится к определению величины изменяемого объема, необходимого для достаточного изменения плавучести. Крылья же позволяют глайдеру управляемо перемещаться вперед.
В качестве характерного примера такого аппарата можно привести глайдер Ru 27 «Scarlet knight» (тип Slocum), разработанный в лаборатории университета Rutgers, расположенного в Нью-Джерси. В 2009 году этот глайдер в автономном режиме пересек Атлантический океан, пройдя около 7500 километров за 201 день, после чего еще 20 дней находился в надводном положении до момента встречи с судном обеспечения [40]. Схема глайдера Ru 27 представлена на рис. 44.
Глайдер Ru 27 представляет собой торпедообразный НПА с крыльями и хвостовым оперением, в котором расположено оборудование для обеспечения спутниковой связи. Калиброванная часть НПА имеет диаметр 8,5 дюймов (216 мм), общая длина глайдера составляет около 2360 мм. Его масса равняется 60,6 кг, при этом батареи занимают почти 40 % веса планера (23,8 килограмма). Общий объем глайдера равен 59,1 л. Таким образом, его общая осредненная плотность составляет примерно 1025 кг/м3, что практически совпадает со значением плотности воды Атлантического океана. Максимальная глубина погружения глайдера — 200 метров. Для контроля текущего значения глубины НПА имеет датчик гидростатического давления.

Рис. 44. Общая схема глайдера и принцип его действия.
Уязвимым местом глайдера является механизм изменения остаточной плавучести. Общая масса воды, которую глайдер набирает и сбрасывает для погружения и всплытия, равна примерно 200 граммам. При невозможности всплыть из-под воды и потере сигналов системы GPS и оператора, глайдер имеет аварийный запас плавучести. Он может продуть специальную аварийную емкость, в результате чего он получает общую положительную плавучесть, равную примерно 500 граммам воды [41]. Таким образом, даже 1 кг дополнительной массы, прикрепленный к глайдеру, способен его «утопить». В качестве подобного груза можно привести фотографию рыбы-прилипалы, которая прикрепилась к носовой части глайдера, практически лишив его управления (рис. 45).
Вообще, в ходе эксплуатации глайдеров, выяснилось, что морские черепахи и акулы, способные серьезно повредить глайдер, довольно длительное время могут его сопровождать.

Рис. 45. Рыба-прилипала (англ. remora) «прицепилась» к глайдеру типа «Slocum».
При этом необходимо отметить, что механизм изменения остаточной плавучести глайдера зависит также и от глубины погружения самого аппарата. Чем глубже погружается глайдер, тем большее гидростатическое давление воздействует на его прочный корпус, уменьшая (хоть и незначительно) его объем. При уменьшении объема корпуса уменьшается и остаточная плавучесть аппарата. Таким образом, при «провале» (или «утягивании») аппарата на глубину, даже при условии сохранения герметичности его прочного корпуса, глайдеру будет необходимо увеличить объем камеры на большую величину, чтобы обеспечить возникновение положительной плавучести.
Отдельно стоит упомянуть о возможном создании биологических захватывающих систем борьбы с необитаемыми аппаратами, например, с привлечением дельфинов. Будучи крайне умными животными, дельфины могут находить и идентифицировать в воде необитаемые подводные аппараты типа глайдеров, и, при расположении на корпусе животного захватной сети или специального приспособления, они вполне могут зафиксировать найденный аппарат и доставить его к месту базирования. В качестве примера можно привести фотографию гринды, используемой в ВМС США для поиска и подъема затонувших опытных образцов испытываемого оружия (рис. 46) [42].

Рис. 46. Гринда с устройством подъема торпед на поверхность.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Пламя всенародной борьбы
Пламя всенародной борьбы Движение «лесных братьев» можно назвать «народным». Не только из-за огромного числа поддерживающих его в первые годы существования (впоследствии две депортации, постепенная деградация борцов за свободу в обычных уголовников, осознание
Начало вооруженной борьбы
Начало вооруженной борьбы Пассивное сопротивление режиму продолжалось недолго. Первые вооруженные конфликты (когда одна из сторон была вынуждена применять оружие) произошли уже во время призывной компании. Одновременно в лесах начали появляться банды. Их членами были
Средства борьбы с минами.
Средства борьбы с минами. Гальванические мины, применявшиеся в XIX веке, требовали достаточно трудоемкого и сложного метода постановки. В то же время такое заграждение было легче снимать, так как располагалось оно вблизи берега, место известно очень точно, и каждую мину
Начало повстанческой борьбы
Начало повстанческой борьбы 14 ноября 1962 года Национальная ассамблея Эритреи, куда вошли и юнионисты и националисты, по приказу императора Хайле Селассие, приняла решение об упразднении Федерации Эритреи и Эфиопии. Эфиопия официально аннексировала Эритрею, сделав ее
Глава 3 Будни «контрпартизанской» борьбы
Глава 3 Будни «контрпартизанской» борьбы В первой половине марта брянские партизаны нанесли новый удар. На сей раз он был направлен на жизненно необходимые оккупантам железные дороги. Удар оказался сокрушительным. «Железные дороги Брянск — Дмитриев-Льговский и
Начало борьбы с большевиками
Начало борьбы с большевиками Когда господа Крыленко и компания заявили, что мы им не нужны на позиции, прекратили нам выдавать продукты и фураж, 1-й Хоперский полк вынужден был из Орши через Днепр идти домой походным порядком. Уже в Черниговской губернии нам дали вагоны,
XI. НАЧАЛО БОРЬБЫ С МЮРИДИЗМОМ
XI. НАЧАЛО БОРЬБЫ С МЮРИДИЗМОМ Бой под Хунзахом, окончившийся полным поражением скопищ Кази-муллы, казалось, подействовал отрезвляющим образом на толпы, увлеченные его учением. Адепты тариката увидели теперь, насколько слабы и не подготовлены были средства к борьбе не
Глава 2. ОПЫТ БОРЬБЫ (ТЕРРОР)
Глава 2. ОПЫТ БОРЬБЫ (ТЕРРОР) Рассказывают, что ещё в детстве будущий руководитель украинских националистов отличался, мягко говоря, странным поведением. Для «укрепления воли», например, побившись об заклад со сверстниками, одной рукой… душил котов. Этого не опровергают и
Глава 3. ИДЕОЛОГИЯ БОРЬБЫ
Глава 3. ИДЕОЛОГИЯ БОРЬБЫ В 1926 году во Львове вышла книга Дмитрия Ивановича Донцова «Национализм». Именно она стала основой идеологии украинского национализма, потому что именно Донцов, не будучи членом ОУН, дал этому движению идеологические основы.Но прежде о самом
Депортация как экономический способ борьбы с УПА
Депортация как экономический способ борьбы с УПА В борьбе с УПА советские репрессивно-карательные органы применяли различные методы военного и экономического характера. К числу последних необходимо отнести, во-первых, отселение местного населения из прифронтовой
Копирование документов специальными аппаратами
Копирование документов специальными аппаратами Выше уже был упомянут ряд способов копирования секретных документов универсальными аппаратами — фото— и видеокамерами. Однако в ряде случаев целесообразно применение специальной копировальной техники, часть которой и
ОПЫТ РЕВОЛЮЦИОННОЙ БОРЬБЫ
ОПЫТ РЕВОЛЮЦИОННОЙ БОРЬБЫ Родился Яков Давтян 10 октября 1888 года в селе Верхние Акулисы Нахичеванского края, в семье крестьянина, занимавшегося мелкой торговлей и садоводством. Отец мальчика умер, когда ему исполнилось всего два года, и мать с двумя детьми на руках
3. Системы борьбы с необитаемыми аппаратами (морскими боевыми роботами)
3. Системы борьбы с необитаемыми аппаратами (морскими боевыми роботами) Рассмотрим системы борьбы с необитаемыми аппаратами более подробно и постараемся выделить направления, которые необходимо активно развивать. В настоящей главе будут приведены данные о
3.1. Обманные системы борьбы с необитаемыми аппаратами
3.1. Обманные системы борьбы с необитаемыми аппаратами Данный тип систем борьбы с необитаемыми аппаратами наиболее распространен в настоящее время в виде средств гидроакустического противодействия (ГПД), дрейфующих НПА самообороны и других подобных устройств. Как
3.2. Истребительные системы борьбы с необитаемыми аппаратами
3.2. Истребительные системы борьбы с необитаемыми аппаратами Истребительные СБНА также в настоящее время активно разрабатываются в качестве так называемых «противоторпед», т. е. подводных аппаратов специального назначения, способных осуществить наведение на
3.4. Комплексные системы борьбы с необитаемыми аппаратами
3.4. Комплексные системы борьбы с необитаемыми аппаратами Как уже отмечалось ранее, комплексные СБНА могут выполнять функции нескольких типов систем, а их состав может определяться любым конкретным назначением системы. На самом деле, большинство систем борьбы с