3.2. Истребительные системы борьбы с необитаемыми аппаратами
3.2. Истребительные системы борьбы с необитаемыми аппаратами
Истребительные СБНА также в настоящее время активно разрабатываются в качестве так называемых «противоторпед», т. е. подводных аппаратов специального назначения, способных осуществить наведение на малогабаритную быстродвижущуюся цель и поразить ее за счет производимого на определенном расстоянии подрыва их боевой части. СБНА такого типа могут успешно применяться не только против атакующего оружия, но и против НПА-носителей, осуществляющих его пуск.
К настоящему моменту существует некоторое количество противоторпедных систем, созданных как в России, так и за рубежом. В качестве примера (рис. 38) можно привести противоторпеду, разрабатываемую Лабораторией прикладных исследований государственного университета Пенсильвании (англ. Applied Research Laboratory of the Pennsylvania State University).

Рис. 38. Противоторпеда, разрабатываемая в государственном университете Пенсильвании [32].
Примером российской разработки может служить специальный комплекс надводного базирования «Пакет-НК». Данный комплекс обеспечивает противолодочную оборону кораблей в ближней зоне и уничтожение торпед, атакующих корабль [33].
В состав комплекса «Пакет-НК» входят торпеды МТТ и противоторпеды М-15 калибров 324 мм, выстреливаемые из модульной пусковой установки СМ-588 с применением пороховых аккумуляторов давления.
Комплекс производит:
— по данным корабельных гидроакустических систем выработку целеуказания на применение торпед МТТ по подводной лодке;
— обнаружение, классификацию и определение параметров движения торпед, атакующих корабль, выработку целеуказания на применение противоторпед М-15;
— предстартовую подготовку модулей боевых средств, выработку и ввод в них стрельбовых данных, выстреливание противоторпед и торпед;
— управление пусковыми установками.
М-15 представляет собой реактивную торпеду с акустическим самонаведением. Вес торпеды 400 кг, скорость хода — 50 узлов, глубина хода до 800 м, эффективная дальность 800–1000 м.
После пуска, на начальном этапе траектории, противоторпеда перемещается с применением инерциальной системы управления по программе, заданной корабельной аппаратурой комплекса. При расчетном приближении к торпеде-цели на 400 м. включается акустическая активно-пассивная система самонаведения противоторпеды. Противоторпеда М-15 оснащена системой самонаведения и неконтактным взрывателем, что позволяет осуществлять подрыв ее 80-ти килограммовой боевой части вблизи от цели.
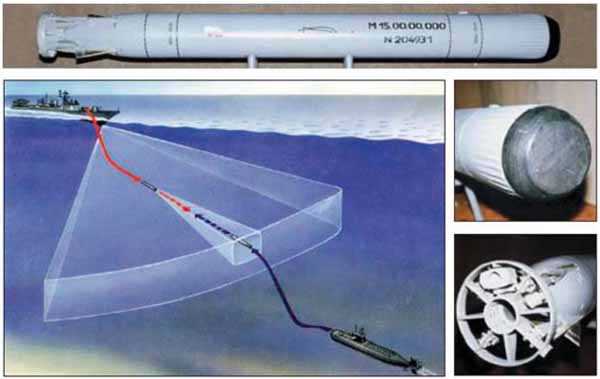
Рис. 39. Схема действия комплекса «Пакет-НК» и противоторпеда М-15.
В состав истребительных СБНА входит не только оружие воздействия на аппараты противника, но и специально разработанные подводные аппараты-охотники, которые должны обеспечить поиск, идентификацию и уничтожение НПА противоборствующей стороны. При этом подобные аппараты, в зависимости от своих габаритов, могут нести разные типы вооружения. Например, малогабаритные аппараты-охотники (в том числе телеуправляемые, располагаемые на стационарных объектах типа буровых платформ) могут иметь в своем составе устройства для подводной стрельбы баллистическими снарядами (иглами), при удачном попадании которых в атакуемый аппарат могут быть повреждены или выведены из строя его ключевые узлы (датчики, рулевые устройства). Естественно, в данном случае речь идет о применении оружия с достаточно близкой дистанции, однако, если рассмотреть вариант атаки «прицепившегося» к ПЛ робота-разведчика, сигнализирующего о ее текущем местонахождении, подобное решение может быть вполне оправданным.
Необходимо отметить, что создание баллистических «кавитирующих» снарядов, позволяющих увеличить эффективную дистанцию подводной стрельбы в последние годы существенно продвинулось вперед, о чем свидетельствует ряд публикаций, в том числе, российских, например, Патент РФ «Кавитирующий сердечник подводного боеприпаса» [34].
В частности, в данном Патенте указывается, что «…в результате применения подобных боеприпасов повышается эффективная дальность поражения подводных целей при воздушной стрельбе в воду и стрельбе в подводном положении с применением стандартного оружия… Кавитирующие сердечники подводных боеприпасов к стандартному оружию более крупного калибра изготовлены ФГУП „Центральный научно-исследовательский институт химии и механики“ и успешно испытаны воздушной стрельбой в воду под углом от 7° до 90° к плоскости воды и кавитационном движении на всей дистанции 162-метрового гидроканала…». Общий вид подобного кавитирующего сердечника приведен на рис. 40.
Таким образом, даже если исходить из дальности эффективной подводной стрельбы, равной 150 метров, можно с уверенностью считать, что подобные подводные боеприпасы могут стать серьезным оружием против всех типов морских необитаемых аппаратов (в том числе торпед), причем оружие, использующее такие боеприпасы, можно будет устанавливать на все типы аппаратов-охотников, на стационарно расставляемые на дно устройства охраны минных полей и т. п.
Рис. 40. Общий вид кавитирующего сердечника.
Еще один вид истребительных СБНА — стационарно устанавливаемых на дно комплексов, предназначенных для защиты определенной территории или объекта (например, буровой платформы) проиллюстрирован на рис. 41.
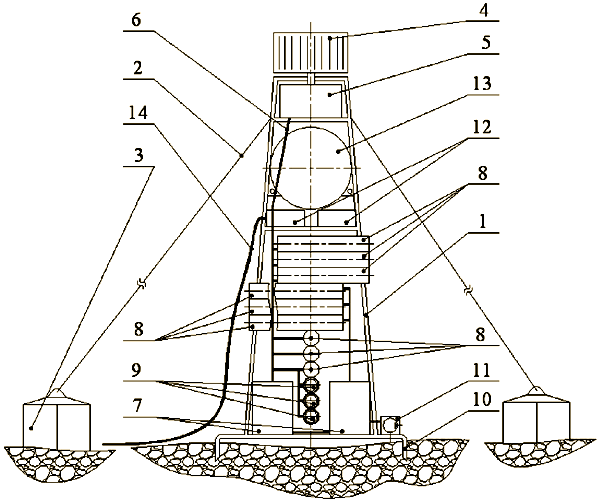
Рис. 41. Общий вид сторожевой башни (пусковой платформы).
На рис. 41 показан общий вид пусковой платформы, на котором прочный корпус 1 платформы установлен вертикально на грунте и зафиксирован в этом положении с помощью растяжек 2, прикрепленных к якорям 3.
В верхней части корпуса 1 расположена использующая течение турбина 4, вал которой взаимодействует с электрогенератором 5, энергия от которого передается по кабелю 6 и накапливается в аккумуляторах 7. Внутри корпуса 1 установлены связанные с аккумуляторами 7 пусковые установки 8, в которых расположены оборонные необитаемые подводные аппараты 9 (торпеды).
Нижняя часть корпуса 1 выполнена в виде круглой юбки 10, врезанной в донную породу. На наружной части юбки установлен гидравлический насос 11, соединенный с внутренним пространством между юбкой 10 и дном.
Также внутри корпуса 1 находится информационно-управляющая аппаратура 12, обрабатывающая информацию, поступающую от гидроакустической антенны 13, а также от охраняемого объекта или наземного контрольного пункта. Эта информация, совместно с возможной подачей платформе резервной электроэнергии, передается по проложенным по дну акватории кабелям 14.
Подводная пусковая платформа работает следующим образом.
Перед установкой на дно подводная платформа полностью подготавливается к эксплуатации в течение определенного промежутка времени. При этом происходит зарядка аккумуляторов 7, производится жесткий монтаж и проверка работоспособности оборудования, располагаемого внутри и снаружи прочного корпуса 1, а также заряжание внутрь пусковых установок 8 подводных аппаратов 9.
После транспортировки платформы к месту ее установки на дно, водолазами или подводными аппаратами производится монтаж на грунте якорей 3. После этого к верхней части корпуса 1, имеющего отрицательную плавучесть, прикрепляется не показанная на чертеже заполненная газом емкость, имеющая такой объем, чтобы общая плавучесть платформы, соединенной с ней, была положительной, но близкой к нулевой. После этого с помощью грузового приспособления платформа опускается с обеспечивающего судна в воду, и остается на плаву близко к поверхности воды. Далее в помощью водолазов к платформе прикрепляются растяжки 2, соединенные с якорями 3.
Изменяя количество газа в емкости и работая лебедками, убирая слабину растяжек 2, осуществляют управляемое погружение платформы, находящейся в вертикальном положении, на дно.
По достижении дна прочный корпус 1 ориентируют с помощью растяжек 2 в вертикальной и горизонтальной плоскостях, после чего приводят в действие питающийся от аккумуляторов 7 гидронасос 11, который выкачивает воду из полости, создаваемой внутренним объемом юбки 10 и наружной поверхностью дна. При этом на наружную поверхность юбки 10 действует гидростатическое давление, которое способствует ее заглублению в грунт и прочной установке платформы. Установка завершается окончательным выравниванием корпуса 1 в вертикальной плоскости за счет натяжения растяжек 2.
Установленные вокруг охраняемого объекта одна или несколько пусковых платформ соединяются с ним или с наземным контрольным пунктом кабелями 14. По сигналу от охраняемого объекта, установленная на дно платформа активирует систему оперативного слежения за подводной обстановкой и начинает передавать получаемую информацию на охраняемый объект. При этом также начинает действовать система электропитания платформы — под действием подводных течений приводится в движение турбина 4, вращение которой с помощью электрогенератора 5, преобразуется в электроэнергию. Меньшая часть этой энергии потребляется на работу информационно-управляющей аппаратуры 12 и гидроакустической антенны 13, а большая — на зарядку аккумуляторов 7. При этом общее время непрерывной зарядки аккумуляторов (до нескольких месяцев) позволяет компенсировать низкую скорость вращения турбины 4 из-за небольшой скорости подводных течений.
В случае возникновения угрозы для охраняемого объекта со стороны каких-либо подводных объектов (необитаемых аппаратов, в том числе надводных), система оперативного слежения обнаруживает их и классифицирует. При этом, определяемое при установке расстояние от пусковой платформы до охраняемого объекта дает дополнительное время на более точное определение координат опасного объекта и выяснение траектории его движения. Это, в свою очередь, способствует более эффективной работе охранных необитаемых подводных аппаратов 9.
В случае, если объект действительно представляет опасность для охраняемого объекта, принимается решение на выпуск одного или нескольких подводных аппаратов 9 для его уничтожения или отведения от цели. При этом, количество пусковых установок 8 позволяет хранить на пусковой платформе необитаемые аппараты 9 разного типа действия — от волнового (низкочастотного) воздействия на биологический объект до воздействия ударной волны (гидравлического удара) на техническое устройство.
Для создания выталкивающего необитаемый аппарат 9 импульса, пусковая установка 8 использует электроэнергию аккумулятора (или нескольких аккумуляторов) 7. При этом общая энергия аккумуляторов 7 должна обеспечивать не менее, чем три последовательных срабатывания пусковых установок 8.
В случае, если угроз много, и возникает необходимость в пуске большего количества подводных аппаратов 9, электроэнергия для работы пусковых установок 8 может быть получена непосредственно от охраняемого объекта по кабелю 14.
Следует заметить, что условия целенаправленной борьбы с НПА существенно отличаются от требований, предъявляемых к средствам ПТЗ. Так, частоты гидроакустических средств НПА в десятки раз выше частот, используемых в системах самонаведения торпед. Также качественно различаются и скорости движения подводных аппаратов и торпедного оружия. Кроме этого существует разница в габаритах, заметности и материалах корпусных конструкций НПА и торпед, что также требует адаптации характеристик противоторпед к новому типу целей.
Можно также добавить, что вопрос размещения на уничтожающих СБНА (НПА-охотниках) морского оружия (самотранспортирующихся мин, торпед и противоторпед), требует создания специальных пусковых установок. Ниже этот вопрос будет рассмотрен более подробно.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Приложение № 2 Советские истребительные части, воевавшие в Заполярье (1941–1944 гг.)
Приложение № 2 Советские истребительные части, воевавшие в Заполярье (1941–1944 гг.) 145-й истребительный авиационный полк19-й гвардейский истребительный авиационный полкУправление полка сформировано в Москве в УК ГУ ВВС РККА 29 декабря 1939 года, после чего убыло на фронт в
Приложение № 3 Истребительные части люфтваффе, воевавшие в Заполярье (1941–1944 гг.)
Приложение № 3 Истребительные части люфтваффе, воевавшие в Заполярье (1941–1944 гг.) JG5 «Eismeer»(«Северное море»)Эскадра JG5, летчики которой воевали как против британских, так и против советских летчиков, как и большинство немецких частей, не создавалась на пустом месте.
Истребительные подразделения
Истребительные подразделения 4-я истребительная авиагруппа/авиакрылоШтаб 4-й истребительной авиагруппы 20,5 победШтаб 4-го истребительного авиакрыла 4 победыПодполковник Гленн Т. Иглстоун 2 (+ 18,5 в годы второй мировой войны)Майор Франклин Л Фишер 3Полковник Фрэнсис С.
Начало вооруженной борьбы
Начало вооруженной борьбы Пассивное сопротивление режиму продолжалось недолго. Первые вооруженные конфликты (когда одна из сторон была вынуждена применять оружие) произошли уже во время призывной компании. Одновременно в лесах начали появляться банды. Их членами были
Наиболее известные истребительные подразделения
Наиболее известные истребительные подразделения 1 Stormo Известное со времен первой мировой войны итальянское истребительное авиационное подразделение 7 мая 1923 г. было преобразовано в 1 Stormo. 6 и 17 Gruppi начали вторую мировую войну с сопровождения рейдов бомбардировщиков Regia
Средства борьбы с минами.
Средства борьбы с минами. Гальванические мины, применявшиеся в XIX веке, требовали достаточно трудоемкого и сложного метода постановки. В то же время такое заграждение было легче снимать, так как располагалось оно вблизи берега, место известно очень точно, и каждую мину
Истребительные группы
Истребительные группы После формирования в июне 1917 г. JG I крупных соединений истребителей на постоянной основе не создавалось до 2 февраля 1918 г., когда были сформированы JG II и JG III. В командование JGII вступил Адольф Риттер фон Тутчек, в командование JG III — Бруно Лоэрцер.Идея
Начало повстанческой борьбы
Начало повстанческой борьбы 14 ноября 1962 года Национальная ассамблея Эритреи, куда вошли и юнионисты и националисты, по приказу императора Хайле Селассие, приняла решение об упразднении Федерации Эритреи и Эфиопии. Эфиопия официально аннексировала Эритрею, сделав ее
Начало борьбы с большевиками
Начало борьбы с большевиками Когда господа Крыленко и компания заявили, что мы им не нужны на позиции, прекратили нам выдавать продукты и фураж, 1-й Хоперский полк вынужден был из Орши через Днепр идти домой походным порядком. Уже в Черниговской губернии нам дали вагоны,
Глава 3. ИДЕОЛОГИЯ БОРЬБЫ
Глава 3. ИДЕОЛОГИЯ БОРЬБЫ В 1926 году во Львове вышла книга Дмитрия Ивановича Донцова «Национализм». Именно она стала основой идеологии украинского национализма, потому что именно Донцов, не будучи членом ОУН, дал этому движению идеологические основы.Но прежде о самом
Копирование документов специальными аппаратами
Копирование документов специальными аппаратами Выше уже был упомянут ряд способов копирования секретных документов универсальными аппаратами — фото— и видеокамерами. Однако в ряде случаев целесообразно применение специальной копировальной техники, часть которой и
ОПЫТ РЕВОЛЮЦИОННОЙ БОРЬБЫ
ОПЫТ РЕВОЛЮЦИОННОЙ БОРЬБЫ Родился Яков Давтян 10 октября 1888 года в селе Верхние Акулисы Нахичеванского края, в семье крестьянина, занимавшегося мелкой торговлей и садоводством. Отец мальчика умер, когда ему исполнилось всего два года, и мать с двумя детьми на руках
3. Системы борьбы с необитаемыми аппаратами (морскими боевыми роботами)
3. Системы борьбы с необитаемыми аппаратами (морскими боевыми роботами) Рассмотрим системы борьбы с необитаемыми аппаратами более подробно и постараемся выделить направления, которые необходимо активно развивать. В настоящей главе будут приведены данные о
3.1. Обманные системы борьбы с необитаемыми аппаратами
3.1. Обманные системы борьбы с необитаемыми аппаратами Данный тип систем борьбы с необитаемыми аппаратами наиболее распространен в настоящее время в виде средств гидроакустического противодействия (ГПД), дрейфующих НПА самообороны и других подобных устройств. Как
3.3. Захватывающие системы борьбы с необитаемыми аппаратами
3.3. Захватывающие системы борьбы с необитаемыми аппаратами Захватывающие СБНА являются очень перспективными, так как они позволяют получать информацию о разработках противника, а также использовать захваченные аппараты в своих целях. В настоящее время (по сведениям,
3.4. Комплексные системы борьбы с необитаемыми аппаратами
3.4. Комплексные системы борьбы с необитаемыми аппаратами Как уже отмечалось ранее, комплексные СБНА могут выполнять функции нескольких типов систем, а их состав может определяться любым конкретным назначением системы. На самом деле, большинство систем борьбы с