Автомобили для бездорожья
Автомобили для бездорожья
Р. Г. Данилов, М.А. Малкин
Памяти Евгения Игнатьевича Прочко (28.07.1938-05.12.2009) – основоположника цикла «Автомобили для бездорожья» и главного конструктора автомобиля «Гидроход-49061»
Продолжение. Начало см. в «ТиВ» №7-11/2009 г., № 1-5,7-12/2010 г., № 1-7,10/2011 г.
В статье использованы фото из архивов ОАО «Инновационная фирма «НАМИ-Сервис» и ОГК СТ АМО ЗИЛ
В первой части статьи мы рассказали об истории автомобиля «Гидроход-49061», разработанного научно-исследовательской фирмой «НАМИ- Сервис» совместно с ОГК СТ AM О ЗИЛ. Опытный образец, созданный для реализации на практике идеи «гибкой» трансмиссии, стал объектом самых разнообразных исследований. Об этом и пойдет речь в статье.
«ГИДР0Х0Д-49061»
Автомобиль «Гидроход», как уникальная лаборатория на колесах, открывал широчайшие возможности перед исследователями. Так как от схемы раздачи мощности в трансмиссии зависят не только показатели проходимости, но и ряд других важнейших эксплуатационных свойств, автомобильная наука получила ценнейшую возможность изучить влияние никогда еще ранее не реализованного на автомобилях индивидуального регулируемого привода колес на тягово-скоростные и динамические показатели, управляемость и экономичность. Единственный в своем роде автомобиль с гидрообъемной трансмиссией представлял интерес для инженеров, так как давал возможность изучить особенности работы гидрообъемной передачи в нетипичной для нее роли привода колес. Это позволяло раскрыть потенциальные возможности гидротрансмиссии, исключить или снизить влияние ее недостатков.
Для решения всех этих задач целесообразно было провести комплексные испытания «Гидрохода» в различных дорожных условиях. Эти испытания были организованы самой фирмой «НАМИ-Сервис» и проводились в течение нескольких лет, получив высокую оценку специалистов, занимающихся вопросами распределения мощности в трансмиссиях автомобилей. Но этому этапу предшествовали еще предварительные испытания и длительная обкатка.

Оценка тяговых возможностей автомобиля «Гидроход» проводилась как при движении передним, таки „ задним ходом. В расположенном рядом автомобиле РАФ-2203 размещена регистрирующая аппаратура. Автополигон НАМИ, г. Дмитров, сентябрь 2003 г.


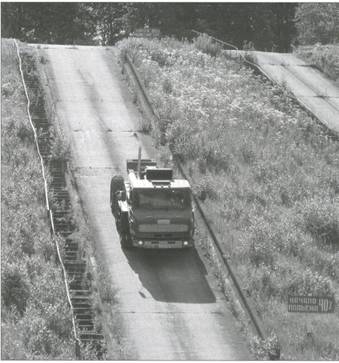
Преодоление подъема 40% во время предварительных испытаний. Автополигон НАМИ, г. Дмитров, сентябрь 2003 г.
Первые километры и первые результаты
Испытания автомобиля было решено начинать сразу по окончании сборки, не дожидаясь готовности системы управления индивидуальными приводами колес. Первая установленная на «Гидроход» система ручного управления, обеспечивающая синхронное и симметричное регулирование всех трех гидроконтуров, позволяла провести обкатку машины, чтобы получить представление о том, как работает гидрообъемная трансмиссия в различных условиях. При этом в активе испытателей еще были возможности выбора блокированной или дифференциальной связи между условными осями, а также движения в неполноприводном режиме с приводом на любые одну или две оси.
Обкатка по внутризаводским дорогам ЗИЛа, проходившая весной 2003 г., не оставила сомнений по поводу работоспособности машины. Прямо скажем, это было большой удачей конструкторского коллектива – макетный образец, в который заложены совершенно нетипичные технические решения, мог и не оправдать ожиданий своих создателей.
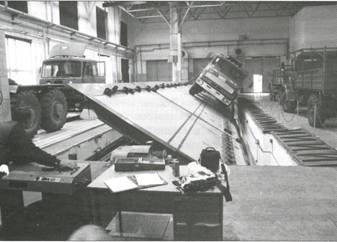
В этот период, в апреле 2003 г., состоялись первые предварительные испытания «Гидрохода» на стенде с беговыми барабанами комплекса «Кавказ» УКЭР АМО ЗИЛ.
Несколько слов о том, что представляет собой этот испытательный комплекс. Это уникальное сооружение, предназначенное для испытаний легковых и грузовых автомобилей в экстремальных климатических условиях. В составе комплекса имеются аэроклиматическая камера и динамометрический стенд с двумя парами беговых барабанов, расстояние между осями которых можно регулировать под величину колесной базы исследуемого автомобиля. Оборудование аэроклиматической камеры позволяет проводить испытания при температуре воздуха от -60°С до +60°С, влажности – до 100% и скорости ветра до 150 км/ч, а на беговых барабанах имитируется движение со скоростью до 190 км/ч или различное дорожное сопротивление.
Конечно, применительно к «Гидроходу» все возможности заводского испытательного комплекса использовать и не планировалось. На данном этапе требовалось оценить работоспособность гидрообъемной трансмиссии при высоких рабочих давлениях и проверить соответствие тяговых показателей автомобиля полученным ранее расчетным значениям. При этом имелась возможность провести такую оценку отдельно для каждой оси автомобиля – напомним, что в конструкции трансмиссии «Гидрохода» предусмотрено как отключение отдельных гидроконтуров, так и отключение приводов отдельных колес. Однако, учитывая особенности конструкции стенда и самого автомобиля, было решено исследовать только две оси из трех. «Гидроход» установили на барабаны стенда передней и задней осями, колеса средней оси при этом сняли, а их привод отключили.
Результаты испытаний в какой-то мере даже превзошли ожидания разработчиков. В гидросистеме удалось развить давление 39 МПа, т.е. близкое к максимальному, которое могут развить примененные насосы (45 МПа). Высокие тяговые свойства машины даже стали причиной небольшого инцидента, произошедшего во время испытаний: от рамы «Гидрохода» оторвалась буксирная петля, к которой крепился трос лебедки, удерживающий машину на стенде, и автомобиль сорвался с беговых барабанов. Но все обошлось благополучно, и после испытаний следы «боевого крещения» устранили.
В августе 2003 г., во время подготовки «Гидрохода» к предварительным испытаниям, в подмосковных Бронницах проходила выставка военной автомобильной техники, организованная на базе НИИИ-21 МО РФ – головного института в этой области. Участие в этой выставке, традиционно включающей в себя демонстрационные заезды представленной техники на испытательном полигоне НИИИ-21, обещало стать важным и весьма ответственным этапом испытаний нового автомобиля, который позволил бы оценить проходимость в условиях тяжелого бездорожья и провести сравнительную оценку опытного образца с серийными армейскими автомобилями. Решение об участии «НАМИ-Сервис» в выставке было принято, и «Гидроход» сразу стал одним из наиболее интересных экспонатов, совершив несколько заездов по испытательной трассе института. Так состоялось первое появление этой машины на публике.


Первые ходовые испытания автомобиля на увлажненном грунте. Окрестности Автополигона НАМИ, г. Дмитров, сентябрь 2003 г.

«НАМИ-Сервис» представляет автомобиль «Гидроход» на выставке военной автомобильной техники в НИИИ-21 (г. Бронницы). Слева направо: В.Э. Маляревич, Е.И. Прочко, С.Б. Шухман, Г.Г. Анкинович. Август 2003 г.

Первый выезд автомобиля после установки дизельного двигателя. АМО ЗИЛ, август 2004 г.

Первый «выход в свет» – выставка военной автомобильной техники в НИИИ-21 (г. Бронницы). Показательные заезды на испытательной трассе института. Август 2003 г.
Осенью 2003 г. начались предварительные испытания «Гидрохода» на Автополигоне НАМИ, расположенном недалеко от г. Дмитров Московской области. Здесь уже можно было провести исследования в различных дорожных условиях. Помимо собственно испытательных заездов на асфальте, сухом и размокшем грунте, проводилась обкатка автомобиля как на дорогах полигона, так и на дорогах общего пользования.
Испытания проводились под руководством ведущего специалиста «НАМИ-Сервис» к.т.н. Г.Г. Анкиновича, а участие в них принимали ведущий инженер-исследователь ОГК СТ АМО ЗИЛ В.М. Ролдугин и инженеры «НАМИ-Сервис» А.С. Переладов и А.А. Эйдман.
В первую очередь было решено определить максимальный угол преодолеваемого автомобилем подъема, поскольку это одна из важнейших характеристик тягово-динамических свойств любого автомобиля, причем не только внедорожного. Испытания производились на типовых подъемах большой крутизны (30, 40, 50, 60%) с асфальтовым покрытием, входящих в комплекс спецдорог Автополигона НАМИ.
Однако здесь испытатели столкнулись с проблемой, характерной для машины с равнорасположенными по базе осями: в начале подъема, где горизонтальное основание переходит в наклонную поверхность, происходило вывешивание колес средней оси автомобиля. Если на 30%-ном подъеме это практически не ощущалось, то на более крутых подъемах проявлялось все более заметно. Тогда было решено проводить каждый заезд в два этапа: сначала с разгону преодолевался перегиб в начале подъема, затем автомобиль останавливался, устанавливалось максимальное передаточное отношение трансмиссии, после чего преодолевался весь подъем без остановок. Одновременно оценивалась возможность преодоления подъема при дифференциальной или блокированной межосевой связи – «гибкое» регулирование трансмиссии еще не было реализовано.
Уверенно преодолев без остановки подъем 30%, «Гидроход» не смог с первой попытки преодолеть следующий подъем (40%) именно по причине вывешивания колес средней оси у основания подъема. При дифференциальной связи в трансмиссии это было вполне объяснимо. Вторая попытка с остановкой после преодоления перегиба подъема оказалась удачной. Автомобиль плавно тронулся с места и прошел весь наклонный участок. С блокированным межосевым приводом преодолеть этот же подъем с первого раза также не удалось. Как выяснилось, насос гидроконтура первой оси не вышел на рабочий режим, практически не развивая рабочее давление (2-4 МПа в сравнении с 15-20 МПа на других осях). И хотя в повторном заезде подъем удалось взять даже с ходу, без промежуточной остановки, проблема с гидроконтуром первой оси сохранилась. Поэтому при преодолении следующего, 50%-ного подъема мощности двигателя явно не хватало: автомобиль, вынужденно двигающийся с приводом фактически только на две оси, смог с разгона преодолеть лишь две трети подъема.

Выставка военной автомобильной техники в НИИИ-21, г. Бронницы. Показательные заезды на испытательной трассе института. Август 2004 г.

Экипаж «Гидрохода» у машины после показательных заездов на выставке военной автомобильной техники в НИИИ-21: водитель-испытатель В.М. Ролдугин (справа) и инженер «НАМИ-Сервис» А.А. Эйдман. г. Бронницы, август 2004 г.
Определение предельного угла опрокидывания автомобиля на специальном стенде-опрокидывателе в лаборатории отдела исследований безопасности автомобилей Автополигона НАМИ, г. Дмитров, сентябрь 2004 г.
Но, несмотря на выявленные проблемы, испытания продолжились, и следующим запланированным экспериментом стало определение максимальной силы тяги, развиваемой автомобилем. Если ранее на заводском стенде тяговые свойства определялись раздельно для двух осей, то на этот раз предполагалось провести полноценные измерения на автомобиле с приводом на все колеса. Так как в конструкции «Гидрохода» была заложена возможность симметричного реверса (то есть передаточное число трансмиссии можно бесступенчато изменять как при движении вперед, так и назад в одном и том же диапазоне), представляло интерес определение максимальной силы тяги, развиваемой как при движении передним, так и задним ходом.
В этом эксперименте задействовали находившийся на автополигоне служебный тягач MA3-543, который буксировался «Гидроходом». Поскольку он был тяжелее «Гидрохода», буксирование начиналось с ходу: оба автомобиля трогались с места, затем водитель буксируемого MA3-543 начинал притормаживать машину, вплоть до полной остановки. Этот момент и соответствовал максимальному значению силы тяги.

Движение по тяжелой грунтовой дороге Автополигона НАМИ, г. Дмитров, июль 2005 г.

Перед испытаниями на управляемость автомобиль был дополнительно укомплектован специальной измерительной аппаратурой – датчиками скорости, боковых ускорений, хода подвески и др. На снимке: водитель-испытатель В.М. Ролдугин оценивает удобство работы с «накладным рулем» – высокоточным датчиком положения рулевого колеса, применяющимся при такого рода испытаниях.

На испытаниях автомобиля. Слева направо: ведущий инженер- исследователь ОГКСТ АМО ЗИЛ В.М. Ролдугин, исполнительный директор ОАО «НАМИ-Сервис» Э.А. Цвирко, сотрудники «НАМИ-Сервис» В.Э. Маляревич, А.А. Эйдман, Р.Х. Курмаев, Д.Н. Гусаков, С.Н. Коркин. Окрестности Автополигона НАМИ, г. Дмитров, июль 2005 г.
Однако результаты этого эксперимента уже не были столь неординарными, как результаты стендовых испытаний на ЗИЛе. Связано это с тем, что в этот раз испытания проводились только при дифференциальной связи в гидрообъемной трансмиссии. Этот режим выбрали для того, чтобы исключить так называемую «циркуляцию мощности» в трансмиссии и тем самым предохранить колесные приводы от чрезмерных крутящих моментов. Но при гидродифференциальной связи высокие давления в трансмиссии не развиваются, и если ранее на стенде удалось развить практически предельное рабочее давление, то в этот раз максимальная зафиксированная его величина была всего 21 МПа.
Во время предварительных испытаний определялись также максимальная и минимальная скорости движения автомобиля. Максимальная скорость, достигнутая на динамометрической дороге автополигона, составила 82 км/ч, а минимальная – 0,9 км/ч. Благодаря гидрообъемному приводу «Гидроход» получил возможность длительного движения с минимальной (так называемой «ползучей») скоростью при сохранении достаточных тяговых свойств, так как в этом случае вся мощность двигателя передается колесам, в отличие, например, от обычной механической трансмиссии, где она будет большей частью затрачиваться на буксование сцепления. В одном из заездов на асфальтовой площадке удалось достичь устойчивой минимальной скорости 0,7 км/ч при частоте вращения двигателя, близкой к холостому ходу (750 об/мин). Конечно, на грунте, когда сопротивление движению выше, двигаться при оборотах холостого хода будет невозможно, но и в этом случае бесспорно преимущество применения на автомобиле высокой проходимости бесступенчатой трансмиссии с широким силовым диапазоном.
На предварительных испытаниях «Гидрохода» в сентябре 2003 г. выполнили и первые научные эксперименты. Связаны они были с теоретическими исследованиями, проводившимися в «НАМИ-Сервис», где под руководством профессора С. Б. Шухмана постоянно шла работа по развитию теории движения автомобиля по твердым и деформируемым поверхностям. На тот момент перед испытателями была поставлена определенная научная задача – исследование колееобразования при движении автомобиля по деформируемому грунту.
Для проведения испытаний выбрали участок поля, примыкающий к границам автополигона. При движении «Гидроход» оставлял глубокую колею (до 30 см), так как грунт был очень влажным – испытательный участок представлял, по сути, пойменный луг. Все требуемые экспериментальные данные для исследований были получены, а сам автомобиль продемонстрировал, что даже при дифференциальной связи в трансмиссии он может двигаться по размокшему грунту.
За время обкатки по дорогам автополигона, как асфальтовым, так и грунтовым, «Гидроход» прошел около 300 км. Отмечалось, что автомобиль уверенно двигается по песчаному покрытию и преодолевает на грунте подъем 16%. В продолжение этих исследований было решено после предварительных испытаний возвращать автомобиль в Москву своим ходом, хотя до этого все перегоны «Гидрохода» на большие расстояния – в Бронницы, в Дмитров и обратно – осуществлялись на жесткой сцепке. Несмотря на некоторые сложности, автомобиль преодолел большую часть пути (около 50 км) своим ходом, а оставшееся расстояние – на буксире. Следует признать, что с точки зрения безопасности движения в условиях города это решение являлось оправданным: органы управления автомобилем были еще очень несовершенными, а его поведение на дороге – не всегда предсказуемым. Так, например, выяснилось, что гидрообъемная трансмиссия при движении накатом очень эффективно выполняет роль тормоза, в связи с чем рабочая тормозная система практически не использовалась. Специфичной была и управляемость «Гидрохода». Автомобиль с передними и задними управляемыми колесами, безусловно, обладает лучшей маневренностью, чем автомобиль только с одной управляемой осью, но управлять им на высокой скорости сложнее, так как часто возникает «рыскание» машины по дороге. А помимо этого типичного для таких автомобилей свойства, управляемости «Гидрохода» были присущи и индивидуальные особенности. Дело в том, что связь между рулевыми приводами передней и задней осей была гидрообъемной, а не жесткой механической, поэтому задние колеса при выходе на прямую не всегда возвращались в исходное положение. Такая рулевая система была в свое время в опытном порядке установлена на несколько ранних экземпляров амфибии ЗИЛ-49061, один из которых и стал основой для «Гидрохода». По понятным причинам такая конструкция себя не оправдала, и на последующих серийных «Синих птицах» рулевые приводы передней и задней осей были связаны механически. Тем не менее, на «Гидроходе» эта не совсем удачная система сохранилась.
Однако не следует оценивать необразцовую управляемость автомобиля на дороге как просчет конструкторов. Не будем забывать о том, что «Гидроход» – это специальное транспортное средство, предназначенное для работы на бездорожье. Ведь конструкция многих вездеходов СКВ ЗИЛ была бескомпромиссной: решения, которые обеспечивали превосходную проходимость на бездорожье, неизбежно затрудняли движение по обычным дорогам. Примером может служить бортовая трансмиссия, не говоря уже о нетрадиционных движителях наподобие шнека.
Что касается удобства управления «Гидроходом», то, конечно, машина с бесступенчатой трансмиссией превосходит автомобиль с механической коробкой передач, но следует учесть, что на данном этапе система управления была упрощенной, и в ней требовалось в зависимости от сопротивления движению подбирать передаточное число трансмиссии с помощью джойстика и регулировать обороты двигателя педалью. В идеале управление такой трансмиссией должно осуществляться только от педали акселератора.
Во время предварительных испытаний немало проблем доставил двигатель. Стало совершенно очевидным, что для уверенного движения автомобиля его мощности явно недостаточно (в частности, это показало преодоление подъемов). Мотор не выдерживал работы с действующими нагрузками и имел огромный расход топлива, достигавший 1,5 л бензина АИ-95 на километр пути. Самой серьезной проблемой обернулись перегревы двигателя. Они наблюдались постоянно, хотя в период испытаний стояла прохладная осенняя погода. Конечно, свой вклад вносили и недостатки системы охлаждения, например, неудачное расположение радиатора, который находился практически за стенкой кабины, но техническое состояние двигателя ЗИЛ-4104 еще при монтаже на автомобиль было далеко не идеальным.
Однако этот мотор «не сдался» даже после решения о замене его на дизель. Ведущий испытатель В.М. Ролдугин вспоминал интересный случай при перегоне автомобиля на ЗИЛ для замены двигателя в апреле 2004 г. Несмотря на все сложности, было принято решение отправлять автомобиль на завод своим ходом. Поездка, в основном проходившая по Третьему транспортному кольцу, прерывалась неоднократными остановками для охлаждения двигателя. Тем не менее «Гидроход» преодолел весь путь до завода, и вдруг уже на территории «родного» отдела ОГК СТ двигатель заглох. Причиной оказалась пробитая прокладка головки блока цилиндров. Но на следующий день сотрудникам отдела вновь удалось завести двигатель, и автомобиль своим ходом доехал до ремонтного бокса.
В августе 2004 г. «Гидроход» выехал с завода с новым дизельным двигателем «Detroit Diesel». Систему охлаждения двигателя существенно переработали: радиатор был вынесен в расширенный корпус воздухозаборника за кабиной, где он лучше обдувался потоком воздуха, и оснащен блоком из четырех электровентиляторов. С ЗИЛа автомобиль сразу был отправлен в Бронницы на проходившую в это время очередную выставку военной автомобильной техники в НИИИ-21, где вновь принял участие в демонстрационных заездах. По работе двигателя теперь не имелось никаких нареканий.
После выставки «Гидроход» вновь вернулся на Автополигон НАМИ. Однако повторение прошлогодних исследований в этот раз не планировалось: первоочередной задачей на тот момент являлась сертификация опытного образца, для чего потребовалось провести измерение некоторых нормативных величин. В числе прочих определялись внешний шум и предельный угол опрокидывания автомобиля, которые оказались в пределах нормы.
По окончании этих исследований «Гидроход» перегнали на ЗИЛ, где совместно с сотрудниками «НАМИ-Сервис» были проведены некоторые доработки автомобиля. Самым главным нововведением, появившимся в этот период, стал пульт ручного управления, с помощью которого можно было индивидуально управлять каждым насосом и гидромотором. Это устройство позволило вручную задавать любое рассогласование в трансмиссии, имитируя тем самым «гибкий» регулируемый колесный привод. Теперь уже можно было непосредственно перейти к исследованиям различных типов привода в трансмиссии.

Порой испытателям приходилось решать и более прозаические задачи, например, вытаскивать застрявший на грунтовой дороге автомобиль. Район д. Карпово Дмитровского района, июнь 2005 г.

Испытания автомобиля «Гидроход» на проходимость по снежной целине. Глубина снежного покрова во время проведения испытаний достигала 1 м. Автополигон НАМИ, г. Дмитров, март 2006 г.

Испытания автомобиля «Гидроход» предусматривали сравнение по основным показателям с наиболее близким аналогом – автомобилем ЗИЛ-4972. Окрестности Автополигона НАМИ, г. Дмитров, август 2005 г.
Всесторонние испытания
Наиболее обширные испытания автомобиля «Гидроход» (включавшие и период зимних испытаний) проводились в 2005-2006 гг.
В коллектив «НАМИ-Сервис» в этот период вошли выпускники кафедры «Автомобили» МГТУ «МАМИ» – С.Н. Коркин, Р.Х. Курмаев, М.А. Малкин, которые участвовали во всех последующих испытаниях и модернизации «Гидрохода» совместно со своими старшими коллегами А.С. Переладовым и А.А. Эйдманом. В первый год проведения испытаний участие в них принимали также В.М. Ролдугин и выпускник МАМИ инженер Д.Н. Гусаков.
В начале июня 2005 г. «Гидроход» вновь доставили на Автополигон НАМИ. Основным этапом комплексных испытаний стали испытания на проходимость автомобиля по грунту, для чего был подготовлен участок поля у поселка Дуброво Дмитровского района, рядом с полигоном.

Преодоление подъема 30%. Автополигон НАМИ, г. Дмитров, июль 2006 г.

Динамический разворот автомобиля на грунте при скорости около 30 км/ч. Окрестности Автополигона НАМИ, г. Дмитров, август 2005 г.

Во время испытаний стояла сухая погода, и для того чтобы провести испытания на размокшем грунте, вспаханный участок поля приходилось искусственно увлажнять. Окрестности Автополигона НАМИ, г. Дмитров, июль 2005 г.
Поясним сразу, что в отличие от, например, приемочных испытаний автомобиля, при испытаниях «Гидрохода» основной целью являлся научный эксперимент, а не прохождение общепринятого эталонного маршрута. Методика проведения этого эксперимента также разрабатывалась самими испытателями, так как подобные экспериментальные исследования еще никогда не осуществлялись.
Все виды испытаний «Гидрохода» проводились при полной массе автомобиля -12т, для чего он был дополнительно загружен балластом. Поскольку главным условием испытаний являлось движение автомобиля по пашне с силой тяги, для эксперимента требовался второй, «тормозной», автомобиль. Им стал «Урал-4320» – «техничка» автополигона, сопровождавшая команду испытателей «НАМИ- Сервис» почти на всех испытаниях. Полная масса «Урала» была несколько меньше «Гидрохода» – 10 т.
Именно на этом этапе испытаний впервые удалось задействовать возможности «Гидрохода» по реализации любого типа межосевого привода (дифференциального, блокированного, регулируемого) и провести полномасштабное сравнение этих трех режимов работы трансмиссии. Однако следует сразу оговориться: под регулируемым приводом в этом эксперименте понимается не «гибкое» регулирование мощности на каждом колесе, а такая схема, при которой для привода каждой условной оси устанавливается свое передаточное отношение, и автомобиль движется с таким «несимметричным» приводом в течение всего заезда. Это было выбрано по нескольким причинам: во-первых, для упрощения проведения эксперимента, а во-вторых – исходя из предположения, что сцепные свойства на всем протяжении испытательного участка изменяются незначительно (в отличие, например, от случая, если бы автомобиль переезжал с твердой грунтовой дороги на вспаханное поле).
Но так или иначе, это решение позволило исследовать движение «Гидрохода» по грунту при различных комбинациях передаточных отношений приводов условных осей. В результате были найдены такие комбинации, которые позволили автомобилю развить силу тяги большую, чем при блокированной межосевой связи. Ведь, как известно, максимум тяговых возможностей полноприводному автомобилю обеспечивает именно блокированная трансмиссия. Испытания «Гидрохода» показали, что регулируемый привод по величине развиваемой силы тяги существенно превосходит блокированный, не говоря уже о дифференциальном. Результаты этих испытаний имели очень большое значение для автомобильной науки – было экспериментально доказано, что возможности регулируемых трансмиссий позволят вывести полноприводные автомобили на новый технический уровень.
Помимо тяговых возможностей, оценивалась также средняя скорость движения по грунту. Для автомобиля высокой проходимости это важный показатель – чем быстрее машина пройдет сложный участок, тем выше ее проходимость. И хотя здесь сравнение оказалось в пользу дифференциального привода трансмиссии, результаты для автомобиля с регулируемым приводом были очень близки к ним. А если учесть, что грунт был достаточно сухим и твердым, то можно предполагать, что в более сложных условиях, где автомобилю с дифференциальной связью в трансмиссии двигаться значительно труднее, преимущество по средней скорости движения тоже принадлежало бы регулируемому приводу.
В программу комплексных испытаний «Гидрохода» были включены и исследования его управляемости. Эта работа проводилась совместно с коллегами из МГТУ «МАМИ», специализирующихся на изучении управляемости и устойчивости автомобиля. При этом были выбраны стандартные виды таких испытаний – «спираль» и «рывок руля», которые выполнялись на асфальтированной площадке. Регулируемая трансмиссия «Гидрохода» позволила испытателям исследовать, как изменяется управляемость машины при разных схемах колесного привода. Например, постепенно изменяя от заезда к заезду передаточные отношения каждого гидроконтура, можно было придать автомобилю свойства переднеприводного, заднеприводного и полноприводного с распределением мощности по осям в любом соотношении. Такие возможности на тот момент не могли быть реализованы ни на каком другом автомобиле.
Еще больший интерес могли бы представлять испытания автомобиля на управляемость при движении по грунту – в этой области автомобильной науки экспериментальных исследований практически нет. Но пока пришлось ограничиться только несколькими демонстрационными заездами, в одном из которых водитель-испытатель В.М. Ролдугин выполнил разворот на поле на скорости около 30 км/ч с очень малым радиусом поворота.
Другим важным этапом испытаний автомобиля «Гидроход», проводившихся два года подряд, стало исследование его энергетических показателей. Так как «Гидроход» стал первым построенным полноприводным автомобилем с гидрообъемной трансмиссией, предстояло изучить особенности ее функционирования при различных нагрузках и схемах распределения мощности по колесам, оценить уровень потерь мощности в гидроприводе, т.е. оценить мощность, реализуемую колесным приводом, и мощность, затрачиваемую на сопротивление качению. Таким образом, предполагалось оценить энергетическую эффективность разработанного привода. Потом эти данные должны были учитываться при разработке алгоритмов управления «гибкой» трансмиссией.
Чтобы обеспечить постоянное сопротивление движению и минимизировать погрешности, этот вид испытаний проводился на асфальтовых дорогах полигона – динамометрической и на комплексе подъемов малой крутизны (4, 6, 8, 10%). Мощность сопротивления движению определялась общепринятым способом – путем буксирования исследуемого автомобиля тягачом с измерением тягового усилия, необходимого для движения.
Зимой 2006 г. впервые состоялся этап зимних испытаний автомобиля, предусматривавший испытания на проходимость по снегу. Для испытаний был выбран участок поля, находившийся непосредственно на территории Автополигона НАМИ.
Однако на тот момент в гидрообъемной трансмиссии применялось масло марки МГЕ-46В, предназначенное для эксплуатации при температуре не ниже -10°С. А поскольку зима 2005-2006 гг. оказалась особенно снежной и морозной, начать испытания удалось только в марте, когда глубина снежного покрова на поле доходила местами до 1 м. В связи с этим программа испытаний была сокращена, и предполагала оценку проходимости автомобиля только при имитации дифференциального и блокированного приводов в трансмиссии. Как и раньше, проходимость оценивалась по величине развиваемой силы тяги. Однако двигаться по снежной целине с 10-тонным «Уралом» на буксире даже с блокированным приводом оказалось практически невозможно. При этом без крюковой нагрузки «Гидроход» свободно преодолевал испытательный участок. Но для того, чтобы все же провести измерения, решили уменьшить крюковую нагрузку, для чего к буксирному прибору «Гидрохода» через трос прицеплялось колесо грузового автомобиля ЗИЛ-130, нагруженное чугунными блоками. Правда, такое решение не могло обеспечить большие значения силы тяги, но главное, что требовалось в данном эксперименте, – обеспечить движение автомобиля в тяговом режиме, который существенно отличается от режима движения одиночного автомобиля. Но и в этом случае уверенное движение по снегу оказалось возможным только при имитации блокированного привода: при гидродифференциальной связи автомобиль не смог пройти испытательный участок.
С учетом опыта испытаний на снежной целине были запланированы дальнейшие исследования, для которых решили подобрать испытательный участок с твердым основанием. На территории автополигона имелась нерасчищенная асфальтированная площадка; глубина снега на ней была немного меньше, чем на поле, – 75 см. Здесь «Гидроход» смог буксировать «Урал» как с блокированным, так и с дифференциальным приводами в трансмиссии, но вполне ожидаемо сила тяги с блокированным приводом оказалась выше, чем при дифференциальном приводе.
Летом 2006 г. начался новый этап комплексных испытаний «Гидрохода» – преодоление профильных препятствий. Еще раз стоит упомянуть, что эти исследования отличались от «классических» испытаний автомобиля на проходимость тем, что в них не ставилось целью пройти маршрут с различными типовыми препятствиями. Здесь, как и ранее при испытаниях на грунте, основной целью ставилось исследование, как влияет регулирование трансмиссии на процесс преодоления препятствия.
Вообще, как известно, максимальные размеры преодолеваемых типовых препятствий – это весьма специфические характеристики, которые актуальны прежде всего для армейских и многоцелевых автомобилей. Автополигон НАМИ, предназначенный для испытаний гражданской автомобильной техники, даже не располагает специальными сооружениями для испытаний на профильную проходимость, которые должны включать уступы различной высоты, рвы переменной ширины и т. п. Поэтому было решено подготовить испытательные сооружения самостоятельно, ограничившись только двумя их типами – уступом (порогом) и рвом.
К сожалению, испытателям пришлось существенно ограничить размеры подготовленных препятствий, особенно порога – нетрудно заметить, что «Гидроход» не лучшим образом приспособлен к преодолению препятствий. Свесы автомобиля превышали 2 м (передний свес имел величину 2,5 м), а дорожный просвет под самой нижней точкой агрегатов трансмиссии составлял 585 мм. Еще до проведения комплексных испытаний было решено отказаться от заднего противоподкатного бруса, но даже без него углы въезда и съезда автомобиля не превышали 20°.
Было рассчитано, что геометрически автомобиль может преодолеть порог максимальной высотой 0,5 м, а ров – шириной до 1,2 м. Конечно, для вездехода такого класса это далеко не выдающиеся показатели, но для решения поставленной научной задачи этого было вполне достаточно. Для устройства порогового препятствия лучше всего подходила бетонная «ванна» бывшего песчаного участка автополигона. Но высота вертикальных стенок этой «ванны», к которым сверху примыкала асфальтированная дорога, составляла 0,7 м. Тогда у основания стенки были уложены прямоугольные бетонные балки, благодаря чему высота стенки уменьшилась до 0,4 м. Перед началом испытательного заезда автомобиль всеми осями въезжал на образовавшийся подиум и останавливался на определенном расстоянии от стенки. Далее начинался собственно испытательный заезд с преодолением препятствия и выходом на дорогу.

Испытания по преодолению порога. Автополигон НАМИ, г. Дмитров, июль 2006 г.

Автомобиль «Гидроход» преодолевает ров шириной 1 м. Автополигон НАМИ, г. Дмитров, июль 2006 г.

Демонстрационный заезд «Гидрохода» с преодолением того же рва под углом.
Второе испытательное сооружение – ров – устраивалось в соответствии с правилами полевой фортификации: экскаватором вырыли траншею шириной 1,2 м, построили бревенчатые стенки с распорками, а на кромках установили бетонные балки, выполнявшие роль бруствера и бермы. Это обеспечило сооружению защиту от осыпания грунта, благодаря чему на нем могло быть выполнено требуемое число заездов без значительного разрушения рва.
Испытания по преодолению препятствий стали первыми, в которых стало имитироваться «гибкое» регулирование трансмиссии в процессе преодоления препятствия. Если ранее при испытаниях с регулируемым приводом на грунте и асфальте, в относительно стабильных условиях движения, задавалось постоянное рассогласование в трансмиссии, с которым автомобиль проходил весь мерный участок, то здесь, при резких, все время изменяющихся нагрузках, требовалось беспрерывное изменение передаточного отношения привода каждого колеса. Разумеется, что при отсутствии автоматической системы управления реализовать это практически невозможно, поэтому регулирование осуществлялось вручную оператором, с помощью пульта управления. Упрощены были и схемы регулирования – при фронтальном преодолении порога и рва регулировались только насосы.
Преодоление рва – еще более динамичный процесс. Здесь требовалось изменять передаточное отношение каждой оси дважды в процессе преодоления препятствия – в момент проваливания колес каждой оси в ров и в момент выезда из него.
Автомобиль преодолел порог во всех заездах, а при преодолении рва были выявлены лишь отдельные случаи застревания, вызванные неудачной схемой регулирования трансмиссии. Цель эксперимента была достигнута: по результатам испытаний удалось установить наиболее предпочтительный способ управления независимыми колесными приводами при преодолении автомобилем препятствий.
Дополнительно было проведено несколько заездов по преодолению рва под углом. При преодолении таким способом динамические нагрузки на автомобиль гораздо ниже вследствие поочередного «проваливания» колес в ров, но реализовать регулируемый привод здесь значительно сложнее, чем при фронтальном преодолении. Для этого необходимо в движении раздельно управлять не только насосами осей, но и гидромоторами отдельных колес, что при ручном управлении трансмиссией практически невозможно. Поэтому эти заезды проводились как демонстрационные только с нерегулируемым блокированным приводом.

Определение мощности сопротивления качению автомобиля «Гидроход» путем буксирования. Динамометрическая дорога Автополигона НАМИ, г. Дмитров, июль 2006 г.

Тягово-динамические испытания автомобиля «Гидроход» на стенде с беговыми барабанами. У машины стоят сотрудники фирмы «НАМИ-Сервис», принимавшие участие в испытаниях: М.А. Малкин, А.А. Эйдман, С.Н. Коркин, Р.Х. Курмаев. Отдел аэродинамических исследований Автополигона НАМИ (аэродинамическая труба), г. Дмитров, октябрь 2006 г.
Одноклассники
Наиболее полно достоинства и недостатки регулируемого колесного привода могли бы проявиться при проведении сравнительных испытаний «Гидрохода» с автомобилями-аналогами, оснащенными механической трансмиссией. Поскольку «Гидроход» был построен на базе ЗИЛ-4906, то очевидно, что именно этот автомобиль-амфибия представлялся наиболее подходящим объектом для сравнения. К сожалению, этой машины, к тому времени уже давно не выпускавшейся, не имелось даже на самом заводе ЗИЛ. Однако в распоряжении ОГК СТ имелись два автомобиля ЗИЛ-4972 с кузовом-фургоном в исполнении «мобильный офис», которые обслуживали руководителей завода на соревнованиях по автокроссу с участием заводской команды. Одну из этих машин, которая, как известно, является неплавающим вариантом «Синей птицы», имеет в основе то же шасси ЗИЛ-4906 и примерно равные с «Гидроходом» показатели полной массы, отдел предоставил для проведения испытаний. В конце июля 2005 г. водитель-испытатель В.М. Ролдугин привел машину на автополигон.
Сравнительные испытания двух автомобилей на проходимость проводились на вспаханном участке поля у поселка Дуброво. При этом определялись тяговые показатели при буксировании одним автомобилем другого.
В бортовой механической трансмиссии ЗИЛ-4972 с блокируемым межбортовым дифференциалом могли быть реализованы два типа привода – дифференциальный (с повышенной или пониженной передачей в раздаточной коробке) и блокированный. Испытания проводились со всеми возможными типами привода.
Что касается «Гидрохода», заезды осуществлялись с регулируемым приводом, который реализовывался с такими комбинациями передаточных отношений гидроконтуров трансмиссии, которые наилучшим образом зарекомендовали себя в предыдущих испытаниях по величине силы тяги.
Закономерно, что максимум тяговых возможностей ЗИЛ-4972 продемонстрировал при заблокированном межосевом дифференциале. На «Гидроходе» в тех же условиях удалось достичь больших значений силы тяги. Показатели средней скорости движения у «Гидрохода» с регулируемым приводом были также несколько выше, чем у ЗИЛ-4972, как при блокированном, так и при дифференциальном приводе (при пониженной передаче в раздаточной коробке).

Автомобиль «Гидроход» преодолевает подъем 30% (вверху) и 40% задним ходом в период обкатки после модернизации. Автополигон НАМИ, г. Дмитров, июнь 2009 г.
С заботой о земле
Комплексные испытания автомобиля предусматривали также проведение экспериментальных исследований еще в одной области, входящей в сферу научных интересов фирмы «НАМИ-Сервис», – исследования разрушающего воздействия автомобиля на грунт. Интерес создателей автомобилей высокой проходимости к этой области, лежащей на стыке технических и сельскохозяйственных наук, не случаен. При движении по местности колесная машина образует колею, при формировании которой грунт сильно уплотняется, а растительность повреждается или совсем уничтожается. Больше всего страдает верхний плодородный слой почвы при буксовании колес автомобиля. Особенно острой эта проблема является в Заполярье, в условиях тундры, где, как известно, в определенные сезоны вообще запрещена эксплуатация колесных и гусеничных транспортных средств.
Этой важной проблемой озаботились в последнее время многие исследователи и производители автомобилей и сельскохозяйственной техники. Ответом послужило появление в последние годы многочисленных образцов вездеходов с шинами сверхнизкого давления, как построенных на базе серийных автомобилей, так и оригинальных конструкций.
Но каким образом «гибкая» трансмиссия может обеспечить улучшение экологических показателей автомобиля? Поскольку одним из главных разрушающих факторов является буксование колес, которое возникает из-за того, что подводимый к колесу крутящий момент не соответствует его сцепным свойствам, то очевидно, что буксование нужно исключить, обеспечив регулирование подводимой к каждому колесу мощности в соответствии с его текущими условиями качения. Как мы уже отмечали, решить эту задачу может только «гибкая» трансмиссия.
Некоторые замеры для экологических исследований выполнили еще во время предварительных испытаний в сентябре 2003 г. при движении автомобиля по грунту. В дальнейшем эти исследования были развернуты очень широко: во время комплексных испытаний 2005 г. проводилось сравнение «Гидрохода» по экологическим показателям не только с ЗИЛ-4972 и «Уралом», но и со специальными «экологическими» транспортными средствами с шинами сверхнизкого давления, уровень вредного воздействия которых принимается за эталон. Принимая во внимание близкие массы «Гидрохода», ЗИЛ-4972 и «Урала», минимальное разрушающее воздействие показал «Гидроход», причем не только при прямолинейном движении, но и при повороте, когда поверхностный слой почвы повреждается особенно интенсивно.
Молодые ученые «НАМИ-Сервис» разрушающее воздействие автомобиля на грунт изучили очень подробно, и не только в связи с действием буксования. На него оказывают влияние и другие факторы – давление воздуха в шинах, схема поворота, а, следовательно, расположение осей и схема рулевого управления автомобиля, и даже скорость движения. Многие из задач в этой области решались впервые.
Вторая молодость
Опыт, полученный за четыре года испытаний «Гидрохода», позволил выявить многие слабые места в конструкции машины. Поскольку впереди еще предстояла главная работа – отладка автоматической системы управления «гибкой» трансмиссией, требовалось по возможности решить все возникшие технические проблемы.
Если с основным источником проблем на первых этапах испытаний – бензиновым двигателем – вопрос был решен, то в последнее время все чаще возникали нарекания на работу гидравлики. Помимо частых отказов, заметно упали и мощностные показатели гидрообъемной трансмиссии, что было засвидетельствовано по результатам стендовых испытаний, проведенных в октябре 2006 г. на стенде с беговыми барабанами в отделе аэродинамических исследований Автополигона НАМИ.
Поиск причин преждевременного «старения» гидрообъемной трансмиссии исследователи «НАМИ-Сервис» проводили совместно с инженерами фирмы «Bosch Rexroth» – изготовителя гидромашин. Выяснилось, что снижение мощностных показателей связано с тем, что гидромашины длительное время работали на неоптимальных режимах. Дело в том, что серийно выпускаемые гидромашины, которые применяются в основном на строительной и сельскохозяйственной технике, работают обычно при малых скоростях – для них это нормальный эксплуатационный режим. Автомобили же эксплуатируются в совершенно другом скоростном режиме, и автомобильная гидрообъемная трансмиссия должна работать с высокими частотами вращения. А в таких режимах нередки случаи перегрева гидромашин: масло не успевает охлаждаться, нарушается нормальная слаженная работа всех обслуживающих гидравлических систем. В гидромоторах автомобиля были обнаружены дефекты, причиной которых стали, по мнению специалистов «Bosch Rexroth», перегревы трансмиссии при высоких частотах вращения.
Кроме того, выяснилось, что для гидрообъемной трансмиссии было неудачно подобрано гидравлическое масло. За все время опытной эксплуатации «Гидрохода» использовалось масло нескольких марок и с различной вязкостью, а поскольку никаких рекомендаций по его подбору для автомобильных гидрообъемных трансмиссий не существовало, создателям «Гидрохода» оставалось ориентироваться на опыт эксплуатации гидрообъемных приводов в других областях техники, где как мы уже сказали, рабочие режимы существенно отличаются от автомобильных.
Еще на предварительных испытаниях было обнаружено, что даже при синхронном управлении гидроконтурами трансмиссии они работают несогласованно. Но технические возможности не позволяли отслеживать, как гидромашины реагируют на управляющее воздействие, хотя инженерами «НАМИ-Сервис» этот вопрос поднимался неоднократно. Поэтому, когда приняли решение о проведении модернизации автомобиля и появилась возможность заменить при этом все гидромашины, были установлены насосы с устройствами обратной связи. Теперь блок управления мог получать информацию о фактических рабочих объемах каждого насоса. Это существенно повысило надежность системы управления.
Все работы по модернизации проводились в ремонтном боксе на территории Автополигона НАМИ в течение 2008 г. силами инженерного коллектива «НАМИ-Сервис» – А.С. Переладовым, С.Н. Коркиным, Р.Х. Курмаевым, М.А. Малкиным под руководством Г.Г. Анкиновича. Основную инженерную работу по доработке гидрообъемной трансмиссии, проектированию новых узлов для нее вновь выполнил Е.И. Прочко.
Как уже упоминалось, основной целью модернизации «Гидрохода» был переход к автоматической, легко перепрограммируемой системе управления. Поскольку функции ручного управления в новой системе сохранялись, обкатка автомобиля с модернизированной трансмиссией началась еще до завершения отладки автоматики. В январе 2009 г. автомобиль совершил первый выезд, а весной исследователи приступили к обкатке машины по дорогам автополигона – динамометрической, подъемам большой и малой крутизны. Снятый на время модернизации «Гидрохода» кузов решили не устанавливать до завершения исследований, а чтобы распределение нагрузки по осям было равномерным, автомобиль был загружен балластом до полной массы 10 т.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Автомобили
Автомобили Потребность и наличие автомобилей в Красной Армии составляют: По грузовым машинам ЗИС, мастерским типа «А» и «Б» и походно-зарядным станциям Красная Армия имеет значительный некомплект.Рассчитывать на покрытие некомплекта по этим машинам за счет поставки по
Автомобили, тракторы, мотоциклы
Автомобили, тракторы, мотоциклы В главу «Танковый ленд-лиз» этот раздел включён не случайно. Конечно же, ни автомобили, ни тракторы, ни мотоциклы к бронетанковой технике не относятся, но их наличие является важнейшим условием повышения мобильности войск, и в первую
Легковые автомобили
Легковые автомобили Создать массовый автомобиль собственной конструкции было для Вилли Мессершмитта весьма престижной и финансово заманчивой задачей. Он представлял себе аэродинамически безупречный несущий кузов и заднее расположение мотора воздушного охлаждения.
Автомобили для бездорожья
Автомобили для бездорожья К 55-летию Специального конструкторского бюро Московского автомобильного завода им. И.А. ЛихачеваПродолжение. Начало см. в «ТиВ» № 7-11/2009 г., № 1–5,7-12/2010 г., № 1–5/2011 г.В статье использованы фото из архива ОГКСТАМОЗИЛ. Р. Г. ДаниловСерийный
Автомобили для бездорожья
Автомобили для бездорожья Р. Г. Данилов, М.А. МалкинПамяти Евгения Игнатьевича Прочко (28.07.1938-05.12.2009) – основоположника цикла «Автомобили для бездорожья» и главного конструктора автомобиля «Гидроход-49061»Продолжение. Начало см. в «ТиВ» №7-11/2009 г., № 1-5,7-12/2010 г., № 1-7,10/2011 г.В
Автомобили для бездорожья
Автомобили для бездорожья Е.И. Прочко, Р. Г. ДаниловК 55-летию Специального конструкторского бюро Московского автомобильного завода им. И. В. Сталина7 июля 2009 г. исполняется 55 лет Специальному конструкторскому бюро ЗИЛ, отделу по спецтехнике (в настоящее время ОГК СТ), где и
Автомобили для бездорожья
Автомобили для бездорожья Р. Г. ДаниловВ статье использованы фото из архива ОГК СТ АМО «ЗИЛ».Продолжение. Начало см. в «ТиВ» №7-11/2009 г., № 1-5.7-12/2010 г.. №1-7.10.12/2011
Европейские плавающие транспортные автомобили
Европейские плавающие транспортные автомобили Плавающий автомобиль AMs Stalwart, модель ВВ течение прошлого века в ряде европейских стран (Россия, Германия, Великобритания, Италия, Испания и др.) были разработаны и производились мелкими сериями плавающие транспортные
Паровые автомобили Русской армии
Паровые автомобили Русской армии К 105-летию автомобильных войск РоссииГеннадий Каминский, Станислав Кирилец Реклама английской фирмы «Рустон, Проктор и К°». 1898 г.Команда дорожных паровозовВ конце 1875 г. в официальном органе Военного министерства газете «Русский
Паровые автомобили Русской армии
Паровые автомобили Русской армии К 105-летию автомобильных войск РоссииГеннадий Канинский, Станислав Кирилец «Русский паровой каток» в английской политической карикатуре 1914 г.Курский конфуз рутьеровБолее чем скромные результаты работы, показанные рутьерами в составе
АВТОМОБИЛИ
АВТОМОБИЛИ К 1 января 1916 г. в армии налицо было 5300[86] автомобилей разного назначения, 1350 мотоциклов и 3500 самокатов. Потребность на ближайшие 18 месяцев была исчислена: 19 300 автомобилей, 13 600 мотоциклов, 9300 самокатов. Получено было в течение 12 месяцев 1916 г.: 6800 автомобилей, 1700
Автомобили
Автомобили Успехи в производстве новейших средств ведения войны кажутся ряду авторов особенно убедительными при доказательстве «взрывного» роста российской экономики в связи с войной. В постройке грузовиков он проявился, по мнению Стоуна, с такой же силой, как и в