Комплекс «Поларис А-1» — образец для подражания?
Комплекс «Поларис А-1» — образец для подражания?
Развитие идеивооружения подводных лодок баллистическими ракетами. Часть IV (продолжение)
Павел Константинов
См. ТиВ. № 4.5,7.8/2004 г. № 3.4/20051
Подводные лодки — «дешево и сердито»
Первые американские подводные лодки-ракетоносцы, предназначенные дя вооружения ракетами «Поларис А-1», создавались также форсированными темпами. Поскольку на проектирование специальных атомных подводных лодок с баллистическими ракетами (ПЛАРБ) времени не хватало, то ВМС США приняли компромиссное решение — использовать конструкцию создававшихся в то время атомных подводных лодок. Таким образом, первые ПЛАРБ. по существу, представляли собой подводную лодку «Скорпион» SSN 589 (типа «Скипджек»), между носовой и кормовой частями которой был размещен ракетный отсек миной 40 м с 16 пусковыми шахтами. Однако «малой кровью» обойтись не удалось: для размещения соответствующего оборудования и дополнительных 40 членов экипажа пришлось перекомпоновать остальные помещения. Неизменным остался только отсек с ядерной энергетической установкой. Тем не менее, несмотря на то что эта подводная лодка не проектировалась специально в расчете на вооружение БР. такая конструкция после некоторой модификации была признана приемлемой для всех последующих ПЛАРБ ВМС США. Кроме того, такой подход позволил сократить срок постройки и достигнуть определенной экономии финансовых средств. Конструктивно новая лодка разительно отличалась от подводных лодок времен Второй мировой войны.
ПЛАРБ «Джордж Вашингтон», созданная отделением «Электрик Боут» компании «Дженерал Дайнемикс» в г. Гротоне, по своей конструкции относилась к полуторакорпусным лодкам. Ее обводы оптимизировали для достижения максимальной подводной скорости. Второй отсек был удлинен в связи с необходимостью размещения дополнительной аппаратуры. В его трюме установили гироскопический успокоитель качки. Он почти в пять раз снижал амплитуду качаний на глубинах до 50 м, что повышало точность стрельбы.
Строительство ПЛАРБ.
В третьем отсеке располагались ракетные шахты, оборудование, обеспечивавшее обслуживание, подготовку и старт ракет. Здесь же хранился запас сжатого воздуха для стрельбы.
Один ядерныи реактор S5W обеспечивал работу турбин мощностью 15000 лл., что позволяло подводной лодке развивать скорость подводного хода до 24 узлов. Срок службы реактора до перезарядки активной зоны составлял пять лет. На лодке стоял один многолопастный гребной винт. На субмарине имелась также вспомогательная дизель-электрическая установка, которую можно было использовать в случае аварии главной энергетической установки. Под дизеля ми лодка могла двигаться с пятиузловой скоростью.
Помимо ракетного вооружения субмарина оснащалась торпедными аппаратами с боезапасом в 18 торпед Мк16 mod. 6 или Mk37, предназначавшихся для самообороны, Позже, в 1974 г., при очередном перевооружении эти торпеды заменили на Мк48.
Хотя американские ПЛАРБ типа «Джордж Вашингтон» не были лишены конструктивных недостатков (главным из них была нерациональная компенсация горизонтальных и вертикальных нагрузок на ракету, осуществляемая за счет амортизации пускового стакана посредством гидродинамических амортизаторов, что не позволяло использовать весь объем пусковой шахты), они практически по всем показателям превосходили советские атомные ракетные лодки проектов, введенные в строй в то же время, в частности, по условиям обитаемости экипажа, находящегося длительное время в ограниченном замкнутом пространстве.
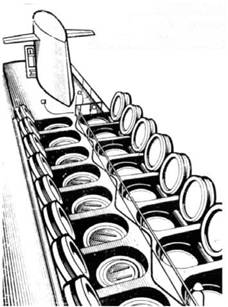
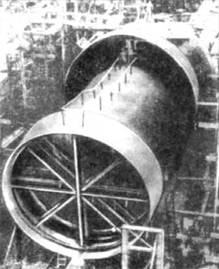
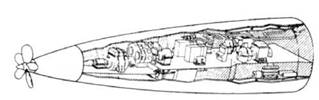
Внешний вид и схема ракетного отсека ПЛАРБ типа «Джордж Вашингтон».

Спуск на воду ПЛАРБ «Джордж Вашингтон».
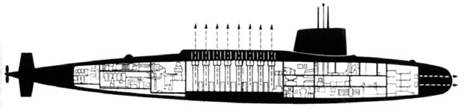
Схема ПЛАРБ типа «Джордж Вашингтон».
Стартовая система ракеты «Поларис А-1»
На подводной лодке ракеты «Поларис А-1» находились в вертикальном положении в 16 ракетных шахтах, которые размещались в третьем отсеке. Здесь же располагалось оборудование, обеспечивавшее обслуживание, подготовку и старт ракет, и хранился запас сжатого воздуха для стрельбы.
Шахты, выступавшие за пределы прочного корпуса, закрывались крышками, имеющими профиль легкой обтекаемой надстройки, длина которой на подводных лодках типа «Джордж Вашингтон» составляла 40 м.
Каждая из 16 пусковых шахт состояла из следующих основных элементов:
— собственно пусковой шахты;
— гидропневмосистемы;
— клапанов;
— штекерного разъема;
— диафрагм, закрывающих шахту;
— системы подачи воздуха;
— системы контроля и проверки всех узлов пусковой установки.
Пусковая шахта Mk-17 mod. I представляла собой двустенную стальную конструкцию цилиндрической формы, закрытую сверху прочной крышкой. Внешний диаметр шахты 2,13 м, внутренний диаметр пусковой трубы 1,45 м. Высота шахт на подводной лодке типа «Джордж Вашингтон» составляла 8,7 м. Сверху пусковая труба закрывалась заглушкой (диафрагмой) из пластмассы «майлар». Серийное производство пусковых труб осуществлялось фирмой «Вестингауз Электрик» на заводе в г. Саннивейле (шт. Калифорния). Каждая груба собиралась из пяти секций (толщина стенок 9,5 мм) с фланцевыми соединениями.
Дя доступа к механизмам и приборам ракеты в каждой шахте имелись три люка, закрывавшиеся прочными стальными крышками с пластмассовыми уплотнениями. Через верхний люк обеспечивался доступ к приборному отсеку и к головной части ракеты, а через два нижних — к переходнику между ступенями ракеты. Кроме того, в стенке каждой пусковой трубы имелись отверстия для кабелей, идущих к штекерному разъему ракеты.
В прочный корпус подводной лодки внутренний цилиндр пусковой шахты монтировался на 20–30 башмаках, опиравшихся на гидравлические амортизаторы. Ракета устанавливалась в шахте на специальной качающейся опоре и крепилась к ней при помощи зажимного кольца, смонтированного на этой опоре.
Центровка ракеты обеспечивалась профилированными башмаками, прижимаемыми к корпусу ракеты пружинами. Для виброизоляции и амортизации ударных нагрузок, возникавших при движении лодки, а также при взрывах глубинных бомб вблизи лодки до запуска ракет, служили расположенные между стенками пусковой трубы и шахты гидравлические цилиндры, для амортизации нагрузок при запуске — стопорные цилиндры. Пусковая труба вместе с баллистической ракетой, подвешенная к шахте, могла свободно перемещаться, и в то же время благодаря такой подвеске они оставались изолированными от непосредственного воздействия внешних сил. При отработке комплекса отмечалось, что гидравлические демпферы представляли ряд неудобств: за ними необходимо постоянно следить, так как могла произойти утечка гидравлической жидкости через уплотнения; ремонт демпферов оказался очень сложен, так как зазор между стенками пусковой трубы и стакана составлял лишь несколько дюймов (1 дюйм равен 2,54 см).
Все шахты снабжались системой кондиционирования для поддержания заданной температуры и влажности твердого ракетного топлива на номинале. С этой целью в стенах шахт были устроены каналы, через которые прокачивалась горячая и холодная вода.
Ракета неплотно входила в пусковую трубу подводной лодки, откуда она выбрасывалась сжатым воздухом. Зазор, заполненный специальными уплотняющими прокладками, был оставлен для того, чтобы уменьшить трение корпуса ракеты о стенки трубы и допустить в будущем увеличение диаметра ракеты.
Запускалась ракета с глубины 25–35 м сжатым воздухом высокого давления, для чего каждая из шахт оборудовалась автономной воздушной системой. Воздух хранился в стальных сферических баллонах диаметром 1,2 м под пусковыми трубами. Емкость баллона, рассчитанного на давление 315 кг/см?, составляла 0,9–0,95 м общий запас стрельбового воздуха на подводной лодке типа «Джордж Вашингтон» 14–15 м?. Эти резервуары изготавливались фирмой «Лайкенс Стилл». Сжатый воздух из резервуара подавался в шахту по трубопроводу диаметром 25 мм. Для наполнения резервуаров сжатым воздухом на каждой подводной лодке имелись три компрессора производительностью по 0,38 м?/мин.
Пусковые шахты оборудовались специальной блокирующей системой, исключающей возможность выдачи сигнала «Пуск», если подготовка к пуску ракет еще не закончена (например, при закрытых крышках шахт; если не выравнено давление в шахте или не сняты стопорные кольца с ракеты и т. д.). Кроме того, блокирующая система исключала возможность включения двигателя в шахте или его самовоспламенение. Штекерное соединение всех систем ракеты автоматически отсоединялось в момент пуска ракеты.
Перед пуском ракеты давление в пусковой шахте выравнивалось с забортным, после чего открывалась прочная крышка шахты, идоступ забортной воде преграждала лишь сравнительно тонкая пластикатовая диафрагма, расположенная под прочной крышкой шахты. Затем под обтюратор ракеты через систему клапанов подавался сжатый воздух по строго определенному графику, точно выдерживаемому специальной автоматической аппаратурой, что обеспечивало заданный режим движения ракеты в шахте. Когда усилие давления в полости под ракетой превышало ее массу, она начинала движение по внутренней пусковой трубе.
При движении вверх ракета разрывала диафрагму, и забортная вода свободно поступала в шахту. Специальный автомат системы замещения обеспечивал продувку водяного балласта для компенсации избытка в весе, возникающего при заполнении шахты водой, что необходимо для стабилизации движения подводной лодки. После пуска ракеты прочная крышка шахты автоматически закрывалась, и находившаяся в шахте забортная вода сливалась в специальную цистерну, размещенную внутри лодки. Поскольку согласно принятому проекту, после выстрела пусковые трубы заливались водой, то готовые трубы подвергались гидростатическим испытаниям под давлением, значительно превышающим давление на максимальной глубине погружения лодки.
Стартовое ускорение ракеты составляло около 10 g при скорости выхода из шахты 45 м/с и отрицательном ускорении самой подводной лодки приблизительно 0,02 д. Установлено, что подобное ускорение движения ракеты не оказывало сколько-нибудь существенного воздействия на бортовую аппаратуру, чувствительные механизмы и устройства ракеты. Когда ракета двигалась в воде, то сопла ракетного двигателя первой ступени были закрыты специальной крышкой с невозвратными клапанами, через которые из ракеты стравливался воздух, расширявшийся в связи с понижением внешнего давления по мере приближения к поверхности воды. Из-за того, что разница между забортным давлением и давлением внутри ракеты оказалась невелика, это позволило сделать стенки ракеты по своей конструкции достаточно легкими.
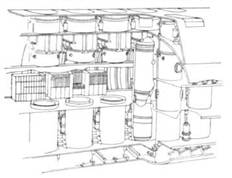
Хвостовой отсек ПЛАРБ.
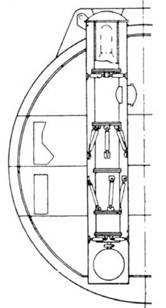
Схема пусковой установки ПЛАРБ.
Системы боевого управления, связи и навигации
Параллельное работой над ракетой, ее двигателями и пусковыми устройствами в США много внимания уделялось созданию остальных элементов комплекса, в частности, системы управления и специальной навигационной системы для оборудования кораблей-носителей.
Значение навигационной системы трудно недооценить, ибо совершенно ясно, что от точности определения подводной лодкой своего географического места в момент пуска ракеты в значительной степени зависит и точность попадания последней в цель.
Головным исполнителем по разработке и производству системы управления огнем ракет «Поларис», предназначенных для вооружения атомных подводных лодок, являлась фирма «Дженерал Электрик». Эта система, в свою очередь, замыкалась на другие ракетные и корабельные системы.
Полет ракеты «Поларис А-1» осуществлялся по заранее заданной программе-траектории без какой-либо последующей коррек тировки с подводной лодки-ракетоносца, что предъявляло особенно высокие требования к системам навигационной привязки и наведения комплекса. Поэтому-то примененная в комплексе автономная система управления Mk-1 обеспечивала вывод ракеты на заданную траекторию, стабилизацию ее полета и выключение двигателя второй ступени ракеты при достижении заданной начальной скорости.
Фирма «Нортроп» разработала специальную систему автоматической проверки ракет «Поларис», находящихся на борту атомных подводных лодок и вспомогательных судов, предназначенных для обслуживания этих лодок, DATICO (Digital Automatic Таре Intelligence Cheak-Out). Распределительный щит этой системы обслуживал все блоки каждой из 16 ракет и мог выполнять следующие операции:
— непрерывную проверку всех основных блоков ракеты с момента ее погрузки на корабль;
— периодическую экспериментальную проверку систем пуска и управления ракетой;
— полную проверку узлов ракеты в период предстартовой подготовки.
В систему DATICO входили программный блок со считывающим устройством, система развертки, блок переключения программ, селектор, генератор тактовых импульсов, блок сравнения и блок индикаторов с печатающим устройством.
Перед стартом ракеты бортовая аппаратура подключалась к корабельной системе приборов управления ракетной стрельбой (ПУРС) типа Мк-80, примененной впервые на одиннадцати лодках типа «Джордж Вашингтон» и «Этен Аллен». При этом в аппаратуру управления начинали непрерывно поступать данные, задающие координаты траектории и величину скорости полета ракеты в конце активного участка. Одновременно производилась ориентация и раскрутка гироскопов и т. д.
Аппаратура ПУРС состояла из вычислительной машины с блоками памяти, хранящими информацию о возможных целях, и оптико-электронного устройства, служащего для контроля ориентации стабилизированной платформы.
С помощью вычислительной машины ПУРС решались следующие основные задачи:
— рассчитывалась траектория полета ракеты;
— определялась местная вертикаль и производилась ориентация стабилизированной платформы бортовой аппаратуры;
— в бортовую систему управления вводились величины необходимой скорости полета ракеты в конце активного участка траектории:
— фиксировались отклонения масштабных коэффициентов акселерометра;
— осуществлялся непрерывный контроль за бортовой аппаратурой ПУРС и готовностью ракеты к старту.
Бортовая система ПУРС связана с навигационным комплексом SINS (Ship Inertial Navigation System), от которого поступали данные о текущих координатах самого корабля с точностью долей километра, а также сведения о килевой и бортовой качке лодки, о возможном сносе, вызванном подводными течениями.
Принцип действия этой системы состоял в непрерывном измерении ускорения одновременно в трех взаимно перпендикулярных плоскостях. На стабилизированной платформе, которая с помощью гироскопов удерживалась в плоскости горизонта и в направлении север-юг, устанавливались акселерометры. Они постоянно измеряли отдельные составляющие ускорения и передавали информацию в вычислительное устройство, которое, в свою очередь, введя поправки, выдавало сведения о широте, долготе и скорости лодки.
В навигационном посту ракетной подводной лодки размещались следующие узлы и устройства:
— три комплекса системы SINS, смонтированных на стабилизированной платформе;
— стабилизированный перископ типа II для использования в целях астронавигации из подводного положения;
— радионавигационная система.
— две специальные вычислительные машины типа NAVDAC.
Каждая система SINS, включавшая гироплатформу с тремя гироскопами и акселерометрами, служила для определения направления на истинный север, положения подводной лодки относительно вертикали и измерения ее скорости. Система была защищена от влияния помех и могла быть использована для вывода подводной лодки в заданное место без использования внешних ориентиров.
Оптическая система автоматического слежения за звездами имела свою аналого-цифровую вычислительную машину STARDAC для выработки данных, обеспечивавших стабилизацию системы. В это устройство вводились данные о движении лодки, полученные от системы SINS. При помощи счетно- решающего устройства STARDAC обеспечивалась направленность перископа на выбранную звезду и определялось положение лодки. Соответствующая информация вводилась в устройство NAVDAC. куда поступали также данные непосредственно от трех систем SINS и от радиолокационной системы.
Все три комплекса навигационной системы S1NS работали независимо и параллельно. Их одновременное применение позволяло свести к минимуму ошибки в определении истинного местоположения корабля, поскольку поступавшие с их выходов данные взаимно корректировали друг друга.
Подводные лодки типа «Джордж Вашингтон», вооруженные ракетами «Поларис А-1»
№ п/п Название ПЛ Номер лодки Головная судостроительная верфь Дата спуска на воду Дата передачи ВМС США Дата вступления в состав ВМС США Год вывода из состава 1. «Джордж Вашингтон» SSBN-598 Electric Boat 9.06.59 30.12.59 15.11.60 1985 2. «Патрик Генри» SSBN-599 Electnc Boat 22.09.59 9.04.60 30.12.60 1984 3. «Теодор Рузвельт» SSBN-600 Mare Island Naval Shipyard 3.10.59 13.02.61 19.07.61 1981 4 «Роберт Ли» SSBN-601 Navport Navs Shipbuilding and DocK 18.1259 16.09.60 2 05.61 1983 5. «Авраам Линкольн» SSBN-602 Portsmouth Naval Shipyard 14.05 60 11.03.61 28.0861 1981Таким образом, данные, вырабатываемые всеми элементами системы управления, непрерывно сравнивались и анализировались. В случае появления недопустимого по величине отклонения того или иного параметра по сравнению с заданным в работу включалась вычислительная машина NAVDAC, вычислявшая поправку и вводившая исправленное значение данного параметра в соответствующее устройство системы управления. Навигационная система комплекса включала также успокоители качки подводной лодки с гироскопом весом около 23 т.
Система управления запуском Мк-80 фирмы «Дженерал Электрик» снабжалась комплектом перфокарт «Контрол Дата», куда вводились данные корабельного инерциального навигатора SINS. Корабельная система ПУРС Мк-80 вместе со вспомогательными системами (астронавигаторами, лагом, гирогоризонтом, радиопеленгаторами и пр.) непрерывно автоматически вырабатывала все необходимые данные для обеспечения старта и наведения ракеты (курс, скорость, крен, дифферент, рыскание, глубина погружения, координаты подводной лодки, скорость вращения земли и пр.).
Подводная обстановка освещалась активно-пассивным сонаром BQS-4. первая модификация которого позволяла с высокой достоверностью классифицировать цели на дальностях до 7200 м. Для определения надводной обстановки использовались локатор типа BRS-12 и два перископа. Для обеспечения связи и получения боевых приказов на лодке устанавливалось разнообразное радиооборудование.
Тактико-технические элементы подводных лодок типа «Джордж Вашингтон»
Размеры, м 116,3x10x8,8 Водоизмещение, т Надводное 6019. подводное 6888 Силовая установка Ядерный реактор 1 S5Wс водяным охлаждением и паровые турбины мощностью 15000 п.с. Скорость, узлов При надводном ходе 20, при подводном ходе 30,5 Дальность плавания надводным ходом Не ограничена Глувина погружения, м 200 Вооружение 16 ракет «Поларис», шесть 533-мм торпедных аппаратов Радиолокационное оборудование Сонар: 1 ВОН 7 Локатор/Радар: 1 III 2 mod 4 SINS Системы управления огнем: 1 Мк 80 Экипаж, чел. 112
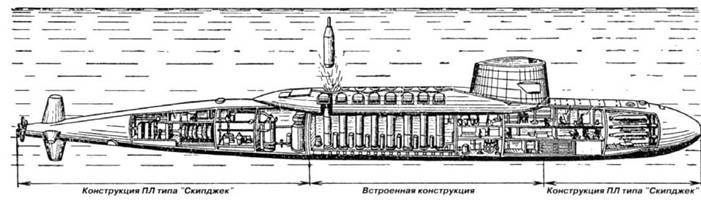
Схема пуска ракеты «Поларис А-1».

График пуска ракеты «Поларис А-1».
Команды на запуск ракеты «Поларис» подавались с центрального пульта управления. В системе запуска предусматривались дублирующие и блокирующие устройства. По сигналу боевой тревоги пусковая труба в шахте фиксировалась (притягивалась вниз), открывались крышки люков над пусковыми трубами и расслаблялось зажимное кольцо. Ракета под давлением сжатого воздуха выбрасывалась из трубы, прорывая диафрагму. Включение двигателя первой ступени ракеты производилось над поверхностью воды на высоте 15–25 м по команде бортового счетно-решающего устройства ракеты.
Несмотря на то что рабочая глубина погружения составляла 220 м, пуски ракет можно было провести с глубины не более 25 м при скорости не больше пяти узлов, и только последовательно. Первая ракета могла стартовать через 15 минут после получения соответствующего приказа.
Для связи с лодками, вооруженными ракетами «Поларис», ВМС США использовали радиостанции в г, Катлере и в г. Джим Крин. На радиостанции в г. Катлере, занимающей площадь 1150 га, установили передатчик мощностью 2 мВт. включающий в себя четыре 500-киловаттпых усилителя мощности с воздушным охлаждением. Мощность передатчика в г. Джим Крин составляла 1,2 мВт. Помимо перечисленных станций ВМС США могли использовать также сверхдлинноволновые станции, которые находились в США (шт. Мэриленд), на Гавайских островах, в зоне Панамского канала и в Японии.
Схема пуска ракеты
Время предстартовой подготовки первой ракеты составляло 15 минут, а запуск остальных 15 мог производиться с интервалом не более минуты. Стрельба осуществлялась на любом курсе подводной лодки из подводного положения.
Запуск ракеты происходил следующим образом: по сигналу системы Мк-80 срабатывал баллон сжатого воздуха, воздух подавался в пусковую трубу, в результате чего ракета выталкивалась и выходила из воды со скоростью 60 м/с. Двигатель первой ступени ракеты «Поларис А-1» запускался на высоте 15–25 м над поверхностью воды, давлением истекающей струи выбивались крышки, закрывающие сопла двигателей. Последовательность операций, связанных с включением двигателя, регулировалась временным механизмом, управление ракетой осуществлялось только на начальном (активном) участке траектории при работающих двигателях с помощью дефлекторов. На этом участке траектории гиростабилизированная платформа (ГСП) ориентировала ракету на цель и удерживала ее в вертикальном положении. После выгорания топлива примерно на высоте 20 км происходило разделение ступеней. Через некоторое время с помощью заряда ВВ из пентритового шнура отделялся переходник. Затем после небольшого замедления включался РДТТ второй ступени, и далее ракета полностью управлялась по сигналам бортовой ЦВМ. Отделение второй ступени от боеголовки осуществлялось на высоте 110 км. Максимальная скорость полета достигала 3,56 км/с.
При выходе ракеты из атмосферы, на высоте около 10 км, от действия вспомогательного РДТТ Мк-20 сбрасывался вперед и в сторону носовой обтекатель и здесь же подавался сигнал на взвод системы отделения боевого заряда. Далее заряд продолжал автономный полет по баллистической траектории, действуя в соответствии с заданной программой, и, достигая цели, взрывался.
Пуск ракеты мог осуществляться на любом морском театре, свободном ото льда, при скорости хода подводной лодки 2–3 узла с глубины до 35 м.
Окончание следует
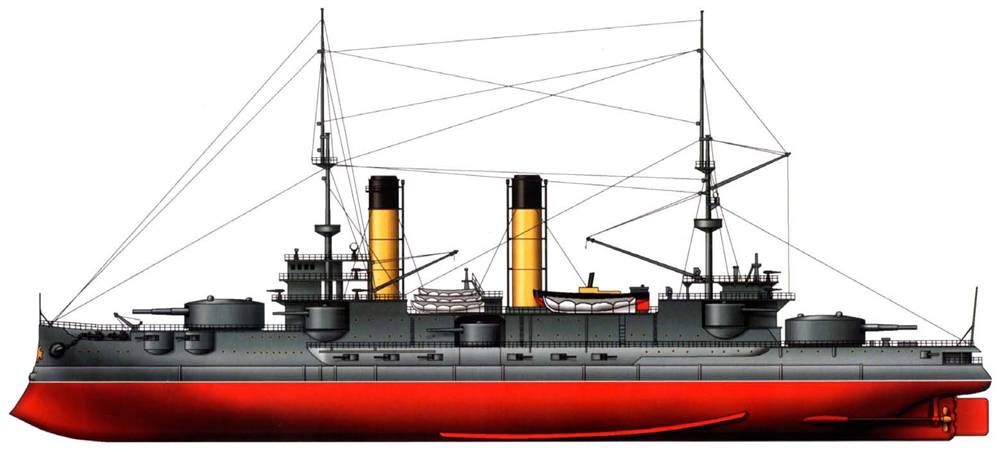
Броненосец «БОРОДИНО»

Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
«Образец успеха»
«Образец успеха» К тому моменту, когда поступил соответствующий запрос, Шекли почти полгода проработал руководителем отделения ЦРУ в Берлине. В Германию он был направлен после длительных, но безуспешных попыток по свержению Кастро, предпринимаемых из оперативного
«Прекрасный образец немецкой авиационной техники»
«Прекрасный образец немецкой авиационной техники» В начале 1938 года положение Испанской республики стало катастрофическим. Генерал Франко располагал хорошо обученными 350-тысячными вооруженными силами, состоявшими из трех армий: Северной генерала Хосе Солчаги,
Комплекс «Канарейка»
Комплекс «Канарейка» В связи с переходом на калибр 5,45 мм для вооружения подразделений войск специального назначения в начале 70-х годов был разработан специальный бесшумный стрелково-гранатометный комплекс, получивший название «Канарейка». В комплекс вошли 5,45-мм
Образец договора, заключаемого с информантами Центром устной истории ЕУСПб
Образец договора, заключаемого с информантами Центром устной истории ЕУСПб Центр устной историиПри Европейском университете в Санкт-ПетербургеСанкт-Петербург «» 2003 г.Соглашение о безвозмездной передаче фонозаписи1. Центр устной истории при Европейском университете
13. Новый образец
13. Новый образец 30 сентября 1883 г., еще не законченный Балтийским заводом и имевший неполную нагрузку, крейсер "Владимир Мономах", конвоируя шедшую в Копенгаген (с государем) императорскую яхту "Держава", достиг фантастической по тем временам 17-узло вой скорости. Сигнал,
6. "Батум"-первый классический образец
6. "Батум"-первый классический образец Успешные попытки активного применения минного оружия их малыми носителями — минными катерами в войне 1877–1878 гг. подтвердили эффективность и перспективность нарождавшегося в те годы нового класса боевых кораблей — миноносцев.
Бомбардировщик S.79 (опытный образец)
Бомбардировщик S.79 (опытный образец) Прототип бомбардировщика S. 79, имевший серийный номер М.М.20663, впервые поднялся в воздух 8 июля 1936 года. Его двигательная установка включала три мотора Alfa Romeo 125. Топливо находилось в шести связанных между собой крыльевых баках вмещавших
Комплекс «Поларис А-1» — образец для подражания?
Комплекс «Поларис А-1» — образец для подражания? Развитие идеивооружения подводных лодок баллистическими ракетами. Часть IV (продолжение)Павел КонстантиновСм. ТиВ. № 4.5,7.8/2004 г. № 3.4/20051Подводные лодки — «дешево и сердито»Первые американские подводные лодки-ракетоносцы,
Комплекс «Поларис А-2» — дальше, выше, больше
Комплекс «Поларис А-2» — дальше, выше, больше Развитие идеи вооружения подводных лодок баллистическими ракетами — Часть VI* (окончание)Павел Ка чур* См. «ТиВ» №4,5,7.8/2004 г., № 3–8,10.11/2005 г.Системы боевого управления, связи и навигацииТочность стрельбы БРПА «Поларис А-2»
Голландия: примеры для подражания
Голландия: примеры для подражания Памятники Сталину в Амстердаме и Гааге будут сохранены. Как сообщили голландские СМИ в конце ноября 2005 г., такое решение приняли администрации этих городов. В Гааге это «изваяние» помещено в архитектурную имитацию красной телефонной
Снайперский комплекс ВСК-94
Снайперский комплекс ВСК-94 9-мм винтовочный снайперский комплекс ВСК-94 разработан в Тульском конструкторском бюро приборостроения (КБП). В его состав входит собственно винтовка, патроны СП-5 (СП-6, ПАБ-9) и дневной прицел. Комплекс предназначен для поражения живой силы в