Шумопеленгатор — «уши» подводной лодки
Не только подводные лодки опасны для надводных кораблей, но и подводным лодкам угрожает опасность быть атакованными надводными кораблями, а особенно противолодочными кораблями (охотниками за подводными лодками). Поэтому, естественно, подводные лодки должны иметь хорошую гидроакустическую аппаратуру, позволяющую им свободно ориентироваться в подводном положении, обнаруживать и выбирать цели, а при необходимости и уклоняться от преследования.
Мы уже знаем, что в воде, как и в воздухе, существует бесчисленное количество звуков. Большей частью это звуки неорганизованные, представляющие собой природные шумы (шум перекатывающейся гальки, всплески волн, звуки косяков рыб и др.) и шумы создаваемые (шумы от винтов кораблей, подводных работ и др.).
Нас, конечно, больше интересуют шумы, создаваемые винтами кораблей. Можно ли отличить шумы винтов крейсера от шума винтов транспорта, шумы эскадренного миноносца от шумов подводной лодки и т. д.? Да, можно. Человеческое ухо способно различать шумы винтов различных классов кораблей. Более того, хорошо натренированный гидроакустик определит не только класс корабля, но и ориентировочно его скорость движения. У транспортов, особенно крупных, винты вращаются с небольшой скоростью. Число оборотов винтов можно сосчитать. Запустив секундомер, гидроакустик считает число оборотов винтов за одну минуту, и ориентировочно определяет скорость транспорта.
У боевых кораблей, особенно таких, как эскадренные миноносцы, сторожевые корабли, торпедные катера и др., число оборотов винтов сосчитать нельзя. В этом случае гидроакустик по интенсивности шума определяет примерную скорость корабля (полный, средний и малый ход).
Задача гидроакустика состоит в том, чтобы обнаружить шум, определить его характер, направление на шумящий объект и установить, в каком направлении объект перемещается. Гидроакустик обязан обеспечить командира корабля всеми необходимыми данными для атаки. При этом подводная лодка должна находиться в подводном положении. Стоит ей только всплыть, как она сразу же будет обнаружена и атакована надводными кораблями.
Находясь даже в подводном положении, подводная лодка должна соблюдать максимальную скрытность. Ее приборы не должны работать на излучение, чтобы не демаскировать себя. Единственным средством наблюдения и обеспечения атаки на подводной лодке служит шумопеленгаторная станция, которая является как бы ее «ушами».
Шумопеленгатором можно обнаружить подводные лодки, надводные корабли и торпеды, определить направление на них, а также обеспечить командира корабля необходимыми данными для атаки кораблей торпедами из подводного положения.
Шумопеленгаторная станция (рис. 29) состоит из акустической системы, усилителей (предварительного, основного, супергетеродинного, слухового), компенсатора и индикаторных приборов (электронно-лучевой трубки, телефона, громкоговорителя).
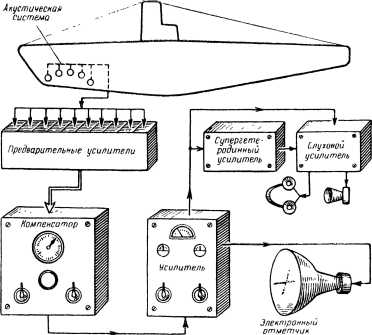
Рис. 29. Схема шумопеленгаторной гидроакустической станции.
Акустическая система представляет собой большое количество пьезоэлектрических приемников, расположенных по кругу или эллипсу обычно в носовой части подводной лодки. Приемники преобразуют акустические колебания шумящего объекта в электрические.
Каждый отдельный приемник не обладает направленностью, а несколько приемников, расположенных по кругу или эллипсу, образуют подобно расположению ушей человека базу, в результате чего акустическая система становится направленной. Чем больше приемников и больше база (расстояние между крайними приемниками), тем больше направленность акустической системы.
Предварительные усилители предназначены для предварительного усиления очень слабых электрических сигналов, возникающих в приемниках под воздействием акустических волн, приходящих от источника звука. Для каждого приемника предусмотрен свой предварительный усилитель, с выходов которого сигналы поступают в компенсатор.
Компенсатор представляет собой серию задерживающих цепей, состоящих из индуктивностей и емкостей, включенных параллельно.
Подключая задерживающие цепи к приемникам, к которым звук пришел раньше, мы добиваемся, чтобы к усилителю от всех приемников сигналы поступали одновременно, без сдвига фаз. Оператор, вращая штурвал компенсатора, добивается максимальной слышимости сигнала, при этом стрелка указателя пеленга покажет направление на шумящий объект.
Для объяснения работы компенсатора рассмотрим упрощенную акустическую систему, состоящую из двух приемников (левого и правого). К левому приемнику звук приходит раньше (рис. 30, а), чем к правому, следовательно, преобразованные электрические сигналы с выходов приемников к усилителю поступят не одновременно, а со сдвигом фаз.
Чтобы определить направление на источник звука, нужно развернуть акустическую систему так, чтобы звук приходил одновременно к обоим приемникам. Геометрическая ось акустической системы укажет направление на источник звука (рис. 30, 6).
Направление на источник звука можно определить, не вращая акустическую систему. Для этого нужно задержать сигнал от левого приемника, куда звук пришел раньше, т. е. уравнять сигналы по фазе. Достигается это включением в цепь левого приемника задерживающих цепей, которые как бы удлиняют путь сигнала левого приемника, в результате чего сигналы от обоих приемников к усилителю придут одновременно, т. е. в фазе (рис. 30, в).
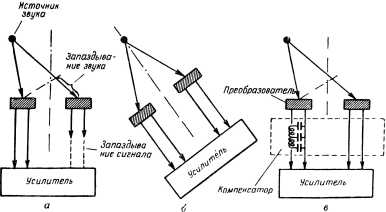
Рис. 30. Определение направления на источник звука: а — к левому приемнику звук приходит раньше; б — после поворота акустической системы звук к обоим приемникам приходит одновременно; в — уравнивание фазы включением задерживающих цепей.
Усилитель представляет собой обычный усилитель на электронных лампах и служит для усиления сигналов, поступающих с выхода компенсатора.
Несмотря на то что сигналы уже усиливались предварительными усилителями, в усилителе они усиливаются до необходимого уровня и преобразуются.
Слуховой усилитель служит для усиления сигналов при пеленговании на звуковых частотах, т. е. частотах, которые воспринимаются человеческим ухом.
Супергетеродинный усилитель предназначен для усиления сигналов при пеленговании на ультразвуковых частотах, т. е. на частотах, которые человек не слышит. Супергетеродинный усилитель преобразует ультразвуковые сигналы в сигналы промежуточной частоты, а затем — в звуковые.
С выхода супергетеродинного усилителя преобразованные сигналы поступают на вход слухового усилителя и далее — как и при пеленговании звуковых сигналов.
На ультразвуковых частотах точность пеленгования повышается, так как характеристика направленности будет более острой, чем на звуковых частотах.
Индикаторные приборы — телефоны и громкоговоритель — служат для прослушивания шумов звуковой частоты. Телефоны надевает на голову оператор гидроакустической станции, а громкоговоритель, как правило, устанавливается на командном пункте. При определении направления, т. е. при пеленговании целей максимальным методом, оператор, вращая штурвал компенсатора, добивается максимальной слышимости.
Электронно-лучевая трубка служит для определения направления на цель фазовым методом, который основан на уравнивании разности сигналов двух приемников или двух групп приемников акустической базы.
При фазовом методе пеленгования применяется двухканальный компенсатор, который делит приемники акустической системы, участвующие в пеленговании, на две группы — левую и правую. С выходов двухканального компенсатора сигналы подаются на входы тоже двухканального усилителя, где они преобразуются и усиливаются, а затем подаются на отклоняющие пластины электронно-лучевой трубки.
При фазовом методе пеленгования оператор добивается, чтобы линия на электронно-лучевой трубке была расположена строго вертикально. В этот момент стрелка компенсатора укажет направление на цель.
Кроме указанных методов, есть еще третий метод — фазово-амплитудный, который также основан на использовании электронно-лучевой трубки. Если ось акустической системы совпадает с направлением на цель, изображение линии будет расположено в центре трубки, а если не совпадает, то изображение линии будет иметь выбросы влево или вправо.
Измерение времени с момента посылки до возвращения отраженного сигнала позволяет определить расстояние до цели с учетом того, что общее время нужно разделить пополам, так как сигнал проходит двойное расстояние — до цели и обратно.
А как же определить в этом случае направление на цель? Мы уже упоминали о том, что ультразвук излучается направленно, что позволяет определить направление на цель с большой точностью. Некоторые современные гидролокаторы определяют также и глубину подводной лодки.
По устройству гидролокационная станция значительно сложнее шумопеленгаторной и состоит из большего числа приборов. В нее входят: преобразователь, подъемно-опускное и поворотное устройства, генератор, реле приема — передачи, усилитель, рекордер, автомат посылок, пульт управления и индикаторные приборы (рис. 31).
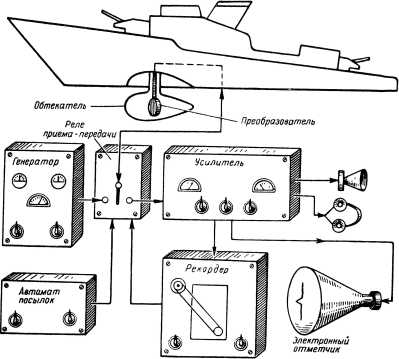
Рис. 31. Схема гидролокационной станции.
Гидроакустический преобразователь служит для излучения ультразвуковых волн и приема отраженных от цели эхосигналов. Ультразвуковые волны излучаются преобразователем короткими посылками. После каждой посылки наступает пауза, во время которой преобразователь становится приемником. Таким образом, преобразователь обладает обратимым свойством, одну часть времени он выполняет функции излучателя, а другую, большую часть времени, — функции приемника.
Действие преобразователей основано на использовании ранее разобранных прямого и обратного магнитострикционного и пьезоэлектрического эффектов.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК