Поиск цели
До появления гидроакустических станций поиск подводных лодок производился зрительными средствами. Вооруженные биноклями наблюдатели внимательно следили за горизонтом: не появится ли перископ подводной лодки, которая также не имела гидроакустической станции и вынуждена была выходить в атаку по данным наблюдения в перископ.
С появлением гидроакустических станций отпала необходимость подводным лодкам поднимать перископ над поверхностью моря. Следовательно, подводную лодку можно обнаружить только гидролокатором.
При поиске подводной лодки гидроакустическая станция надводного корабля работает в режиме эхопеленгования, т. е. через определенные промежутки времени делаются посылки ультразвуковых сигналов.
Поиск ведется при вращении вибратора с левого борта к носу, а затем то же с правого борта и т. д. Такой поиск называется симметричным поиском (рис. 45, а). Шаг поиска может быть различным, например, 5 или 10°. После каждой посылки акустическая система поворачивается на соответствующий угол.
Если вероятность обнаружения подводной лодки больше с какого-нибудь борта, то ведется асимметричный поиск (рис. 45, 6), т. е. с одного борта сектор увеличивается, а с другого уменьшается.
При вероятности появления подводной лодки прямо по курсу поиск ведется с перекрытием носовых курсовых углов (рис. 45, в). В этом случае носовой сектор обследуется дважды.

Рис. 45. Виды гидроакустического поиска подводной лодки: а — симметричный; б — асимметричный; в — с перекрытием носовых курсовых углов.
При поиске шагом 5 или 10° на обследование сектора уходит много времени. Пока гидроакустик ведет поиск с одного борта, подводная лодка может приблизиться с другого борта на дистанцию торпедного залпа. Поэтому поиск подводных лодок более выгодно вести гидролокационной станцией кругового обзора. Такая станция не только обеспечивает быстрое обследование сектора, но и обнаруживает одновременно все цели, которые могут оказаться в зоне действия станции.
При попадании подводной лодки в зону действия гидролокатора от нее отразятся ультразвуковые волны и гидроакустик услышит эхо. После получения эха от второй посылки гидроакустик докладывает командиру корабля направление на цель и дистанцию до нее.
Получив приказание классифицировать контакт, гидроакустик определяет протяженность цели, тон эха, изменение пеленга и четкость записи на рекордограмме. Пеленгуя левый и правый срезы, он определяет средний пеленг на цель и докладывает командиру корабля.
Гидроакустик подводной лодки в это время тоже не бездействует. Он внимательно пеленгует шум винтов преследующего корабля и докладывает командиру подводной лодки направление и по силе звука ориентировочно определяет, сближается корабль или удаляется.
Кроме того, гидроакустик подводной лодки пеленгует ультразвуковые посылки, излучаемые гидролокатором преследующего корабля, что позволяет определить не только направление, но и ориентировочную дистанцию до него. Опытный гидроакустик подводной лодки может также определить, на каком расстоянии рвутся глубинные бомбы и какого они калибра.
Гидроакустики двух кораблей (надводного и подводного) состязаются между собой в умении, опыте, хладнокровии, выдержке. В подводной борьбе побеждает опыт и воля к победе.
Гидролокационной станцией можно обнаружить не только подводную лодку, а и маленькие, но исключительно опасные для всех кораблей контактные мины. Раньше надводные корабли совершенно были беспомощны при плавании в районах, не очищенных от мин, а подводные лодки форсировали минные поля с ежесекундным ожиданием взрыва. Гидролокация позволила определять заранее места, где выставлены контактные мины. А если место постановки мин определено, их всегда можно обойти.
Обнаружить мины труднее, чем подводную лодку, так как эхосигнал от мины очень слаб, и на рекордере запись тоже будет слабой (рис. 46).
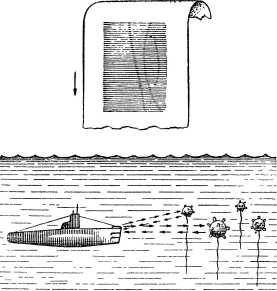
Рис. 46. Запись на рекордограмме от мин.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК