Зоркий подводный глаз
Таким образом, шумопеленгаторные станции работают на принципе так называемой пассивной акустики, т. е. на прослушивании шумов и определении направлений на них. А если интересующий нас подводный предмет не издает никаких шумов, как обнаружить его?
Шумопеленгаторы не могут полностью обеспечить действия надводных кораблей по борьбе с подводными лодками и по другой причине. Чтобы атаковать подводную лодку, нужно не только обнаружить, но и точно определить ее местонахождение, расстояние до нее. Эту задачу выполняют гидролокационные станции, работающие по принципу излучения и приема отраженных от цели ультразвуковых волн.
Гидроакустические преобразователи могут быть кругового и направленного действия. Первые применяются для обнаружения подводных объектов, вторые — для определения направления, расстояния и глубины.
Преобразователь размещается под днищем надводного корабля, ближе к носовой части. Чтобы уменьшить помехи от завихрений воды во время хода корабля, вибратор помещают в металлический обтекатель яйцевидной формы (рис. 32, а). Толщина стенок обтекателя такова, что они не препятствуют прохождению ультразвуковых волн.
В последние годы в США делают обтекатели из пластических масс, обладающих большой прочностью и хорошей звукопроводимостью.
При работе гидролокатора обтекатель опускается ниже киля, а после окончания работы поднимается вверх в специальный отсек так, чтобы он не выступал ниже днища.
Опускается и поднимается обтекатель подъемно-опускным устройством, состоящим из электродвигателя, редуктора и пульта управления.
На некоторых проектах надводных кораблей зарубежных флотов обтекатели закреплены постоянно в носовой части в виде овальных выпуклостей. В этом случае в подъемно-опускном устройстве нет необходимости (рис. 32, 6).
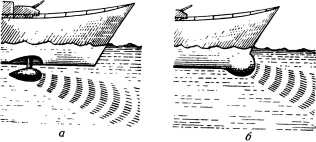
Рис. 32. Обтекатель: а — опускающийся при работе; б — закрепленный неподвижно.
Для вращения преобразователя служит поворотное устройство, состоящее из электродвигателя с редуктором. Управление поворотным устройством дистанционное с пульта управления.
Генератор собран на специальных генераторных лампах большой мощности, аноды, сетки и накалы которых питаются от специального преобразователя (агрегата).
Генератор вырабатывает электрические колебания определенной частоты, которые поступают на преобразователь и излучаются в водную среду уже в виде акустических колебаний.
Реле приема — передачи представляет собой электромагнитное реле с несколькими группами контактов. Реле приема — передачи при посылке ультразвукового сигнала подключает генератор к преобразователю (рис. 33, a), a при приеме отраженного эха — преобразователь к усилителю (рис. 33, 6).

Рис. 33. Принцип работы реле приема — передачи: а — при излучении; б — при приеме.
Усилитель служит для усиления и преобразования очень слабых электрических сигналов, поступающих от преобразователя. Усилитель состоит из нескольких каскадов и собран на усилительных лампах. Один из каскадов представляет собой гетеродин (маломощный генератор), при помощи которого ультразвуковая частота преобразуется в звуковую. С выхода усилителя сигналы поступают на рекордер и индикаторные приборы (телефоны, громкоговоритель, электронный отметчик).
Рекордер служит для графического воспроизведения отраженных сигналов, измерения расстояния до целей, определения относительной скорости сближения с целью и выработки данных для атаки подводной лодки. Кроме того, рекордер управляет работой реле приема — передачи, а следовательно, посылками ультразвуковых сигналов.
Основные элементы рекордера — каретка с записывающим пером (рис. 34) и посылочными контактами, лентопротяжный механизм с электрохимической бумагой и решающее приспособление со шкалами и линейкой.
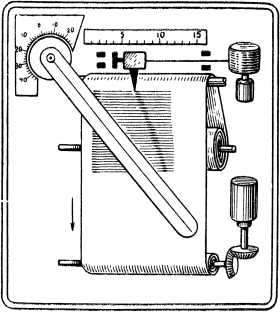
Рис. 34. Рекордер.
Лентопротяжный механизм протягивает сверху вниз специальную бумагу, чувствительную к электрическому току, под воздействием которого на ленте появляются темные отчетливые отметки. При работе рекордера бумага перемещается непрерывно с постоянной скоростью.
При включении рекордера подается питание на электромагнитную муфту, которая начинает передвигать каретку слева направо. В самом начале движения каретка своими контактами замыкает посылочные контакты, через которые подается питание на реле приема — передачи, в результате чего преобразователь подключается к генератору. Посылочные контакты замыкаются на незначительное время (10—100 микросекунд), в течение которого ультразвуковые колебания излучаются в воду.
Каретка продолжает передвигаться с постоянной скоростью, пропорциональной скорости распространения звука в воде.
С приходом эха от цели электрический сигнал с преобразователя через усилитель поступает на перо каретки, в результате чего через бумагу проходит ток, оставляя на ней темную отметку. Расстояние от левого края бумаги до отметки будет соответствовать расстоянию до цели в масштабе шкалы, которая расположена горизонтально над бумагой.
При подходе каретки к правому срезу бумаги замкнутся возвратные контакты, обесточится электромагнитная муфта и каретка возвратится в исходное левое положение, и далее циклы будут повторяться.
В результате многократного передвижения каретки на бумаге возникнет много отметок, расположенных одна над другой. Если расстояние до цели будет уменьшаться, то каждая очередная отметка соответственно будет располагаться ближе к левому срезу (рис. 35, а), а при увеличении расстояния до цели каждая очередная отметка будет удаляться от левого среза (рис. 35, б). На бумаге рекордера возникнет трасса, которая может иметь наклон в ту или другую сторону. Если трасса будет вертикальной, расстояние до цели не изменяется (рис. 35, в).
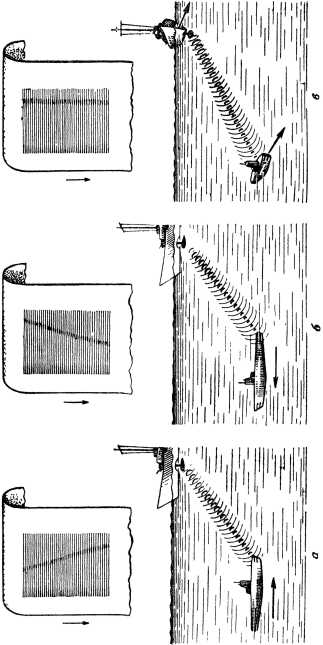
Рис. 35. Характер записи на рекордограмме: а — при сближении; б — при удалении; в — при неизменном расстоянии.
Таким образом, по характеру записи на бумаге рекордера можно определить, сближается цель или удаляется, а приложив линейку вдоль трассы, определить относительную скорость сближения.
Кроме того, по характеру записи можно классифицировать контакт, т. е. отличить цель от ложной цели.
Решающее приспособление рекордера позволяет выработать необходимые данные для использования противолодочного оружия. По этим данным подается команда на пост бомбометов и глубинных бомб.
Автомат посылок служит для управления посылками при поиске цели до ее обнаружения. При работе автомата посылок рекордер выключают, чтобы не создавать перенапряженный режим в работе рекордера и излишне не расходовать электрохимическую бумагу.
Автомат посылок очень прост по устройству и представляет собой реле, конденсатор и несколько сопротивлений, различных по величине. В зависимости от того, какое сопротивление подключено, конденсатор будет разряжаться быстрее или медленнее. Время разряда конденсатора через то или иное сопротивление определяет интервал между посылками.
При включении автомата посылок заряжается конденсатор. В это время через контакты автомата посылок подается питание на реле приема — передачи. Как только конденсатор зарядился, контакты разрываются, реле приема — передачи обесточивается и посылка прекращается. Время заряда конденсатора соответствует длительности посылки.
После разрыва контактов конденсатор начинает разряжаться через сопротивление.
На время разряда конденсатора преобразователь подключен к усилителю, т. е. гидролокационная станция работает на прием. Как только конденсатор разрядился, замыкаются контакты автомата посылок, начинает заряжаться конденсатор и подается питание на реле приема — передачи, и опять происходит посылка. Эти циклы повторяются непрерывно автоматически.
Чтобы изменять интервал между посылками, в автомате посылок имеется несколько сопротивлений, различных по величине. Если оператор подключит самое большое сопротивление, конденсатор будет разряжаться дольше и интервал между посылкой будет большим.
При большем интервале между посылками звук распространится на большее расстояние, а следовательно, зона обследования будет больше.
Малые цели, например мины, обнаруживаются гидролокационной станцией на значительно меньших расстояниях, чем подводная лодка, поэтому большой интервал между посылками нецелесообразен. В этом случае оператор подключает в автомате посылок меньшее сопротивление, конденсатор будет разряжаться быстрее и интервал между посылками сократится.
С приходом эха от цели оператор примет его на слух в виде короткого слабого звука. Чтобы классифицировать цель, оператор сразу включает рекордер, одновременно выключив автомат посылок.
Пульт управления предназначен для дистанционного управления вращением преобразователя, а также подъемно-опускным и поворотным устройствами. Кроме того, на пульте управления размещаются элементы приборов станции.
Индикаторные приборы (электронный отметчик, телефоны, громкоговоритель) служат для регистрации шумов или эхосигналов. Электронный отметчик, кроме того, позволяет определить направление на цель и расстояние до нее, а также может управлять посылками, как и рекордер.
Электронный отметчик представляет собой электроннолучевую трубку с вертикально и горизонтально отклоняющими пластинами, на которые подаются напряжения с выхода двухканального усилителя и генератора пилообразного напряжения.
Направление на цель при фазовом методе пеленгования определяется по отклонению электронного луча. Если акустическая система точно направлена на цель, то электронный луч займет вертикальное положение, если цель справа или слева, то электронный луч соответственно имеет наклон в ту или другую сторону (рис. 36).

Рис. 36. Изображение электронного луча на индикаторе при фазовом методе пеленгования.
При фазово-амплитудном методе направление на цель определяется по выбросам электронного луча вправо или влево (рис. 37).

Рис. 37. Изображение электронного луча на индикаторе при фазово-амплитудном методе пеленгования.
Если акустическая система направлена точно на цель, выбросов не будет.
По методу поиска гидролокационные станции могут быть шагового и кругового поиска. При шаговом поиске акустические волны излучаются направленно в виде узкого луча; при круговом поиске излучение ненаправленное, т. е. круговое, а прием отраженного эхосигнала направленный.
Гидролокационные станции кругового обзора обладают преимуществом: поиск ведется значительно быстрее и одновременно можно наблюдать несколько целей, что невозможно на станции шагового поиска.
Например, в гидролокационных станциях кругового обзора, устанавливаемых на американских атомных подводных лодках, применяются индикаторы кругового обзора, представляющие собой электронно-лучевые трубки, на которых отраженные эхосигналы наблюдаются в виде светящихся отметок (рис. 38).
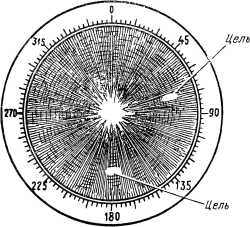
Рис. 38. Гидролокационный индикатор кругового обзора.
Рассмотренная гидролокационная станция может работать и в режиме шумопеленгования. В этом случае в работе участвуют не все приборы, а только те, которые связаны с приемом и усилением шумов. Генератор и рекордер выключаются, и станция работает только на прием.
Дальность действия гидролокаторов очень зависит от гидрологических условий моря, отражательной способности подводных целей, уровня собственных помех и от технических параметров станции.
При увеличении скорости хода противолодочного корабля дальность обнаружения подводной лодки уменьшается, так как появляются шумы от завихрений воды у обтекателя.
Во время второй мировой войны подводные лодки обнаруживались на дистанции до 15 кабельтовых[2].
По данным зарубежной печати, в США и Англии ведутся работы по увеличению дальности действия гидролокаторов. По некоторым источникам, дальность обнаружения подводной лодки составляет 35 кабельтовых, а в ближайшие годы может достигнуть 25 миль (250 кабельтовых). Одним из путей увеличения дальности действия гидролокаторов зарубежные специалисты считают увеличение длины волны, т. е. переход от ультразвуковых частот к звуковым, а также применение буксируемых гидролокаторов с переменной глубиной. В этом случае акустическая система может опускаться на необходимую глубину, где условия распространения звука наиболее благоприятны.
В настоящее время в военно-морском флоте США разрабатываются системы раннего предупреждения о нападении подводных лодок. Предполагается установить на дне Атлантического океана (на глубине 4500–5000 метров) около 10 тысяч специальных датчиков-гидрофонов. Такая система якобы позволит обнаружить подводные лодки на расстоянии 500-1000 миль.
Подводные лодки — главная ударная сила флота, поэтому средства борьбы с ними непрерывно совершенствуются.
В иностранных военно-морских флотах большое значение придается также гидролокаторам, используемым с вертолетов и дирижаблей.
По устройству такие станции почти ничем не отличаются от корабельных, за исключением того, что акустическая система опускается в воду на специальном тросе (рис. 39), а остальные приборы находятся на вертолете или дирижабле.
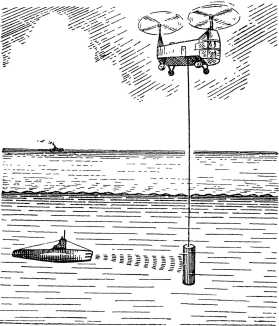
Рис. 39. Вертолетная гидролокационная станция.
Преимущество этого способа в том, что отсутствуют помехи от движения своего корабля и его механизмов, а главное — повышается скорость обследования района. После обследования участка вертолет поднимается с акустической системой и быстро перелетает на другой участок, опускает акустическую систему, после обследования перелетает на третий участок и т. д.
По сведениям иностранной печати, время опускания акустической системы, обследование участка и обратный подъем ее занимают около 5 минут. Расстояние между соседними точками, в которых ведется обследование, выбирается с таким расчетом, чтобы не допускать пропусков обследуемого района и, более того, чтобы обследуемые участки перекрывались между собой.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК