Рожденная космонавтикой Космический вездеход… на земле
Рожденная космонавтикой
Космический вездеход… на земле
Виталий Андреевич Грачев – основатель и первый руководитель Специального конструкторского бюро СКБ ЗИЛ
Бурное развитие пилотируемой космонавтики в первой половине 60-годов, вызвало к жизни мероприятия, направленные на своевременное обнаружение возвращаемых отсеков космических кораблей, оказание первой помощи членам экипажа, а также благополучную доставку космонавтов и спускаемых аппаратов (СА) в заранее обусловленные наземные пункты. Эти задачи были возложены на поисково-спаса- тельный комплекс (ИСК), образованный в начале 1960 г., когда развернулась подготовка к полету человека в космос.
Боевое крещение новая служба получила в том же году при завершении космического полета второго корабля-спутника, на борту которого находились собаки Белка и Стрелка, а также другие живые организмы. По сути это был первый в мировой практике возвращаемый корабль.
Последовавшие за этим новые старты, в том числе полеты Ю. Гагарина и других космонавтов оказали решающее влияние на формирование структуры и определение методов работы ПСК.
Основными поисковыми средствами стали самолеты и вертолеты, оснащенные радиопеленгаторами, которые регистрировали радиосигналы, передаваемые с борта космического корабля (КК). К этой же операции привлекались наземные радиолокационные станции и морские суда, оборудованные радиотехническими устройствами.
Главные силы поиска и эвакуации располагались в плановом районе посадки, а в случае возникновения аварийных ситуаций, которые могли произойти до пуска, либо на участке выведения КК на орбиту и при его досрочном приземлении часть технических средств и личного состава размещались вблизи стартовой позиции, по трассе полета, на участке выведения, в резервных и дополнительных районах.
Во время каждой посадки создавался командный пункт, расположенный на ближайшем к месту посадки спускаемого аппарата аэродроме. Там же находились поисковые самолеты и вертолеты.
Получив сведения о сходе корабля с орбиты на траекторию спуска, самолеты и вертолеты начинают патрулировать в заданных районах до тех пор, пока не будет установлена двухсторонняя связь с экипажем и визуальное обнаружение спускаемого аппарата. Вертолеты, сопровождая СА до самой Земли, фиксируют место его посадки.
Большое значение для безопасности приземления космонавтов имеет соответствие места посадки расчетному.
При неблагоприятных метеоусловиях или в темное время суток поиск и обнаружение спускаемого аппарата должны производить поисково-спасательные отряды. Первое время для эвакуации спускаемых аппаратов приходилось десантировать целое подразделение солдат, которые вручную кантовали его к вертолету. Затем на внешней подвеске аппарат перебазировался в заданное место, как правило, на аэродром. Оперативная группа в район приземления СА могла быть выброшена на парашютах.
Кстати, возвращение первого космонавта чуть было не закончилось его падением в ледяную воду реки Волги, что не только отнесло бы Гагарина от места запеленгованного поисково-спасательной службы (ПСС), но и серьезно затруднило эвакуацию.
Однако наиболее уязвимым звеном в функционировании ПСК стала ограниченная эффективность или полная неспособность действия авиационных средств поиска и эвакуации в сложных погодных условиях и особенностях естественного рельефа местности в районах приземления спускаемых аппаратов. Немаловажное значение имело то обстоятельство, что в наиболее вероятных местах посадок СА значительную часть года стоит нелетная погода, препятствующая работе поисковых вертолетов.
Возросшая интенсивность космических полетов, зависимость их благополучного завершения от природно-климатических факторов, а также несовершенство способов первичной обработки и транспортировки спускаемых аппаратов, предопределило поиск новых путей развития эвакуационных средств. Тем более, что в 1962-1964 гг. были осуществлены групповые полеты кораблей-спутников, и стало возможным выведение на околоземную орбиту многоместных космических кораблей. В таких обстоятельствах фактор риска для жизни членов экипажей увеличивался. Это хорошо понимали ответственные руководители Военно-воздушных сил (ВВС), в ведении которых находилась поисково-спасательная служба, и Генеральный конструктор ракетно-космических систем С. П. Королев. Он-то и обратился к крупнейшему в Советском Союзе специалисту в области наземной транспортной техники высокой проходимости – Виталию Андреевичу Грачеву с предложением создать поисковый вездеход, который смог бы в любую погоду обнаружить и эвакуировать космонавтов вместе со спускаемым аппаратом.
К тому времени возглавляемый В. А. Грачевым коллектив Специального конструкторского бюро (СКБ), образованного на автозаводе им. И. А. Лихачева (ЗИЛ) в 1954 г., спроектировал и изготовил не один десяток экспериментальных и опытных машин самых различных конструктивных схем, ряд из которых после освоения в серийном производстве был принят на вооружение Советской Армии.
Уже 29 декабря 1964 г. заместителем Главнокомандующего ВВС по вооружению были утверждены тактико-технические требования, а в начале марта 1965 г. совместным решением ВВС и Государственного комитета по оборонной технике (ГКОТ) МосавтоЗИЛу поручалось разработать и изготовить опытный образец поисково- эвакуационной установки (ПЭУ) – такое обозначение получило это необычное транспортное средство.
Буквально через десять дней произошло событие, подтвердившее не только исключительную актуальность проводимых работ, но и необходимость ускорения их выполнения. 19 марта 1965 г. выход из строя системы автоматической посадки «Восхода-2» вынудил П. Беляева и А. Леонова воспользоваться ручным управлением для возвращения космического корабля с околоземной орбиты по запасной баллистической траектории. В результате нештатной ситуации экипаж вместо хорошо знакомой и ровной как стол казахской степи оказался в непроходимой тайге в районе г. Перми. Лишь двое суток спустя с немалыми трудностями поисково-спасательный отряд в сильный мороз, преодолевая глубокий снег, обнаружил место приземления и эвакуировал космонавтов. Собственно эвакуация заключалась в совершении лыжного перехода до ближайшей поляны, куда мог сесть вертолет. Именно в таких критических ситуациях так необходима была специализированная наземная техника.
К новой машине предъявлялись весьма жесткие и в чем-то взаимоисключающие требования. Переброска ПЭУ в район предполагаемой посадки СА осуществлялась самолетами Ан-12 и вертолетами Ми-6, а поскольку объем грузового отсека, грузоподъемность и дальность полета последнего довольно ограничены, то автомобиль должен был иметь минимально возможные габаритно-весовые параметры. С другой стороны, обеспечение вездеходности не только при передвижении на суше, но и по воде (в случае приводнения и эвакуации СА из внутренних водоемов) предполагало наличие полноприводного шасси с колесами большого диаметра, достаточного запаса топлива, водонепроницаемого корпуса, обеспечивающего необходимую плавучесть, водоходного движетеля. Для погрузки и надежного крепления спускаемых аппаратов диаметром до 2,4 м и весом до 3 тонн на ПЭУ должны быть смонтированы крановая установка и грузоопорные устройства, которые вместе с радиосвязной, пеленгационной, навигационной аппаратурой, мощным генератором и тяжелыми аккумуляторными батареями требовали рез- вервирования немалой части полезного объема. Следовало найти место для 3-4 членов экипажа, носилок для транспортировки одного космонавта, предусмотреть возможность перевозки надувной лодки, вспомогательного оборудования, контейнеров для укладки в них парашютов, специального инструмента, средств маскировки и других частей СА. А если к этому добавить, что вездеход должен производить поисково-эвакуационные работы в любое время года и суток, при любых метеорологических условиях и температуре окружающего воздуха ± 45°С, то реализация данного проекта представлялась крайне сложной технической задачей.
Как сделать вездеход?
Сознавая важность предстоящей работы и трудность ее выполнения, специалисты СКБ с большим желанием взялись за проектирование поисково-эвакуационной установки. Совершенно очевидно, что без обширных исследований взаимодействия колесного движителя с различными видами грунтов, определения гидродинамических характеристик водоизмещающего корпуса, использование конструкций из легких сплавов и полимерных материалов, внедрения многоступенчатых трансмиссий, независимой подвески с высокой энергоемкостью, многозвенных рулевых управлений и средств, обеспечивающих живучесть машины, невозможно было представить вездеход-амфибию, который был нужен заказчику. Залогом выполнения этих требований стал уникальный опыт, накопленный коллективом при создании внедорожных автомоблией, квалификация его инженеров и рабочих. Весомым подспорьем явилось применение многих хорошо отработанных в производстве и всесторонне проверенных в эксплуатации узлов и агрегатов, серийно выпускаемых на ЗИЛе, Брянском автозаводе (БАЗ) и некоторых других предприятиях. В то же время пришлось столкнуться с ранее не свойственными функциями, касающимися отладки совместной работы радиотехнического и навигационного комплексов, а также разработки погрузочно-разгрузочного механизма, опорных устройств и специальной тележки-контейнера. Вместе с тем были апробированы оригинальные технические решения, существенно улучшившие параметры автомобиля.
Облик будущей машины и ее компоновку определил В. А. Грачев, непосредственно занимавшийся проектированием на начальных этапах; ведущим конструктором был назначен Г. И. Хованский.
Всего лишь около года потребовалось, чтобы появился опытный образец ПЭУ-1. Летом того же 1966 года амфибия была продемонстрирована представительной делегации, в состав которой входили космонавты Ю. А. Гагарин, А. А. Леонов, уполномоченный заказчика начальник управления ВВС В. М. Романенко и другие специалисты. Пояснения давали В. А. Грачев и его ближайшие помощники С. А. Кузнецов и В. Б. Лаврентьев, вклад которого в организацию производства и испытания очень велик. С большим интересом ознакомившись с новинкой, военные дали высокую оценку тем идеям, которые были воплощены в конструкции этого удивительного изделия. Очень важно было услышать лестные отзывы от космонавтов, которые и являлись главными действующими лицами поисково-спасательной программы.
В 196/ году изготовили второй образец ПЭУ-1, который вместе со своим предшественником успешно выдержал государственные испытания и специальные испытания в различных климатических и дорожных условиях. После устранения выявленных недостатков и незначительной доработки машина получила путевку в жизнь. Установочная партия из 5 единиц, изготовленных силами СКБ в 1968 г., поступила в поисково-спасательные подразделения ВВС. Принятая на снабжение приказом Главнокомандующего ВВС в августе 1969 г. ПЭУ-1 стала неотъемлемой частью космической службы.
Что же представляла собой поисково- эвакуационная установка?
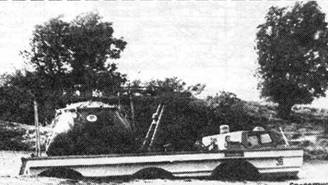
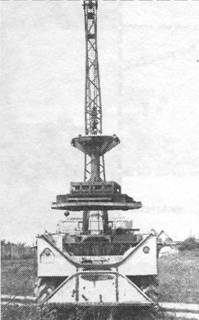
Прежде всего среди прочих колесных машин она резко выделялась своей архитектурой. Герметичный корпус с закругленной передней частью, опирающийся на шесть полутораметровых колес, был увенчан застекленным колпаком и ажурным подъемным краном. Столь же необычной на первый взгляд выглядела и окраска автомобиля. Нижняя часть корпуса до ватерлинии имела красный цвет, средняя – цвет слоновой кости, а все верхние надстройки, включая палубу и крановую установку, были ярко оранжевыми. Именно такое сочетание гарантировало заметность ПЭУ с большого расстояния при различных углах зрения и хорошую различимость на любом естественном фоне.

Первый опытный образец ПЭУ-1. построенный в 1966 г.

В 1966 г, В. А, Грачев принимая представительную делегацию, в соспщве которой находились летчики-космонавты Ю. А. Гагарин и А. А. Леонов.

На фото в кабине слева направо: В. А. Грачев. Ю. А. Гагарин. А. А. Леонов.
В конструкции амфибии все подчинено достижению высоких показателей проходимости, минимизации массы, компромиссу между ограничениями габаритов по условию авиатранспортировки и сохранению объема для размещения спускаемого аппарата.
Поисково-эвакуационную установку можно условно разделить на три части: плавающее трехосное полноприводное шасси (колесная формула 6x6), комплекс радионавигационного оборудования, грузоподъемный механизм. Их взаимное расположение и определило компановку машины.
Ввиду того, что для обеспечения наибольшей эффективности поисковых операций радиотехнические устройства могли быть смонтированы только в переднем свесе корпуса, а оптимальное распределение весовых нагрузок достигалось за счет установки груза и стрелового крана за второй осью, силовой агрегат с обслуживающими системами и топливным баком занял свое место сразу за кабиной экипажа.
Важнейшими свойствами, которыми должно обладать поисковое транспортное средство при эвакуации экипажа, совершившего посадку в труднодоступном районе, являются его проходимость и подвижность, т.е. возможность перемещения с заданной скоростью в условиях полного бездорожья. Действительно в ситуации, когда космонавтам, приземлившимся в местности с неразвитой дорожной сетью или полном ее отсутствием, нужна медицинская либо другая помощь, первостепенную роль играет время прибытия ПЭУ в установленную точку и возвращение по кратчайшему пути вне зависимости от состояния опорной поверхности, по которой приходится двигаться. Кроме того, поскольку освоение космического пространства в мирных целях «сосуществовало» с оборонными аспектами деятельности государства в этой области, интерес военных специалистов к скорейшему получению разведывательной информации, находящейся на борту спускаемого аппарата соответствующего назначения, был очень велик. Это тоже стало одной из функций зиловского вездехода.
Чтобы достижение указанных результатов стало реальным, ПЭУ с погруженным на нее СА должна быть двигаться по шоссейным дорогам со скоростью 40-50 км/ч, по фунтовым дорогам – 20-30 км/ч, по мелколесью, сухому сыпучему песку, полуметровому снежному покрову, заболоченной местности, переувлажненному грунту и воде – 5-10 км/ч. В дополнение ко всему следовало уверено преодолевать подъемы и спуски крутизной 25-30°, устойчиво двигаться по косогору с уклоном до 22°, безбоязненно плавать при высоте волн 0,5 м и скорости ветра 15 м/сек, переезжать рвы и канавы шириной 1,5 метра. Дальность действия 400 км определялась исходя из того, что ПЭУ должна осуществлять поиск СА в радиусе 30- 50 км.
Столь высокие эксплуатационные данные могли быть получены только благодаря применению неординарных технических решений. И они были найдены.
Ее стихия – бездорожье

ПЭУ-1 на испытаниях без груза преодолевала подъем в 34°. с грузом – 30°
Равномерное расположение осей по базе машины (2500 + 2500мм) давало возможность без помех преодолевать канавы и кюветы шириной более 2 метров, обеспечивало монтаж специального оборудования и облегчало придание автомобилю свойства плавучести.
Совокупность работы силовой установки, трансмиссии, подвески и колес обеспечили требуемые тяговые и скоростные качества.
Одним из показателей, характеризующих скоростные свойства и среднюю скорость движения поисково-эвакуационной установки является удельная мощность, т.е. отношение мощности двигателя к полной массе автомобиля, которая превышала 15 л.с/т. Это достигнуто за счет установки доработанного варианта серийного двигателя ЭИЛ-375Я. V-образный, 8-цилиндровый мотор рабочим объемом около 7 литров имеет мощность 180 л.с. и развивает крутящий момент 47,5 кгс.м. Его размещение позади кабины позволило не только смонтировать все радиотехническое оборудование в передней части, но и обеспечивало места для четырех членов экипажа, а также съемных носилок. Габаритные ограничения наложили свой отпечаток на систему охлаждения. Ее радиатор установлен справа от двигателя вблизи борта, а воздухозаборник смещен влево. Влево пришлось перенести воздухоочиститель, соединив его с двигателем подводящей магистралью. Пуск двигателя при низких температурах обеспечивается с помощью предпускового подогревателя. Прямоточный глушитель установлен справа снаружи палубы.
Благоприятное влияние на проходимость за счет плавного подведения крутящего момента к ведущим колесам при движении по поверхностям с ограниченными несущими свойствами, уменьшение динамических нагрузок в трансмиссии, благодаря гашению возникающих колебаний, повышение средних скоростей движения, вследствие более полного использования мощности двигателя при переменных режимах движения, существенное облегчение работы водителя из-за более низких физических нагрузок, обеспечивала установленная на ПЭУ гидромеханическая передача (ГМП). Она состоит из последовательно соединенных в одном блоке гидротрансформатора, планетарной автоматической коробки передач и понижающего редуктора (демультипликатора), которые заимствованы от четырехосного армейского автомобиля ЗИЛ-135Л.
Одноступенчатый комплексный гидротрансформатор, непрерывно и автоматически изменяющий силовой поток двигателя в зависимости от встречающихся на пути автомобиля сопротивлений, включает насосное колесо, жестко соединенное с силовой установкой, турбинное колесо, связанное с коробкой передач, и расположенные между ними двух реакторных колес.
При трогании машины с места гидротрансформатор увеличивает крутящий момент в 2,75 раза. По мере увеличения оборотов турбины, т.е. по мере разгона автомобиля, крутящий момент на выходе из гидротрансформатора уменьшается до величины крутящего момента двигателя и гидротрансформатор начинает работать в режиме гидромуфты, с высоким КПД, равным 0,95.
Чтобы расширить коэффициент приспособляемости гидротрансформатора в соответствии с изменяющимися дорожными условиями, к нему присоединена планетарная коробка передач, обеспечивающая три передачи переднего и одну – заднего хода. Коробка передач состоит из планетарного механизма, двух многодисковых сцеплений, двух ленточных тормозов и системы автоматического управления. Масло в круг циркуляции гидротрансформатора, систему автоматического управления и для смазки шестерен и подшипников подается передним и задним шестеренными насосами.
Для управления режимами движения водителю достаточно нажать одну из четырех кнопок пульта управления, расположенного на щитке приборов. Привод переключения передач соединен с клапанами ручного переключения системы управления. При нажатой кнопке пульта «Н» – нейтраль – все элементы управления планетарной коробки выключены и двигатель отсоединен от колес.
Включение кнопки «П» – первая передача – ПЭУ может двигаться только на первой передаче с передаточным числом 2,35.
Следующая кнопка «Д» – как и в предыдущем случае обеспечивает движение на первой передаче. После небольшого разгона происходит автоматическое переключение на вторую передачу с передаточным числом 1,47. Дальнейший разгон приводит к включению третьей прямой передачи. Если скорость движения уменьшается, происходит автоматическое переключение передач в обратном порядке. На более поздних модификациях передача «П» была отключена, т. к. с ее функциями вполне справлялось включение режима «Д».
Переключение передач планетарной коробки производится клапаном системы автоматического управления в зависимости от скорости движения и нагрузки на двигатель. Кроме того во время движения на прямой передаче, при максимальном перемещении педали акселератора обеспечивается принудительное включение второй передачи, что позволяет быстро произвести разгон автомобиля.
Для движения задним ходом необходимо нажать кнопку «ЗХ». Передаточное число передачи заднего хода 2,26.
Понижающая передача состоит из планетарного механизма, сцепления и дискового тормоза с электрогидравлическим приводом управления. Водитель может привести в действие понижающую передачу двумя кнопками, расположенными на щитке приборов.
Нажатие кнопки «Выкл.» обеспечивает передачу усилия подводимого от планетарной коробки без изменения.
Напротив, увеличение крутящего момента в 2,73 раза происходит при нажатии другой кнопки «Вкл».
Гидромеханическая передача соединена карданным валом с раздаточной коробкой, которая распределяет и увеличивает значение мощностного потока двигателя, подведенного к бортовым передачам. Кроме того, от раздаточной коробки осуществляется привод водоходного движителя (водомета) и лебедки.
Раздаточная коробка подвешена к раме на резиновых подушках.
Передача крутящего момента от раздаточной коробки к бортовым передачам происходит с помощью дифференциала, снабженного механизмом блокировки и рядом цилиндрических шестерен, являющихся главной передачей. Передаточное число главной передачи – 1,296.
Передаточное число привода водомета и лебедки равно 1.
Управление раздаточной коробкой (включение и отключение главной передачи, водомета и лебедки, а также блокировка межбортового дифференциала) производится из кабины водителя посредством дистанционного электромеханического привода.
Перемещение тумблеров, расположенных на щитке приборов, приводит в действие электромеханизмы, перемещающие тяги, установленные на раздаточной коробке.
При включении одного из режимов раздаточной коробки соответствующий электромеханизм, перемещая шток с закрепленной на нем вилкой, вводит в зацепление (или выводит из зацепления) шестерню отбора мощности или соединительную зубчатую муфту.
О полном включении одного из режимов работы сигнализирует лампочка на панели приборов.
На ПЭУ для передачи крутящего момента от двигателя к раздаточной коробке, бортовым передачам всех колес, водометному двигателю и лебедке использованы карданные валы, унифицированные с карданными валами от серийных автомобилей ЗИЛ-130 и ЗИЛ-131.
Подведение крутящего момента к колесам каждой стороны обеспечивается бортовыми передачами и колесными редукторами. Симметричный дифференциал раздаточной коробки распределяет поток мощности поровну между левым и правым бортом.
Привод задних и средних бортовых передач осуществлялся карданными валами, связанными с выходными фланцами раздаточной коробки, а усилие к передним бортовым передачам подводилось продольными карданными валами, соединенными с ведущими валами средних бортовых передач.
Передача крутящего момента к каждому колесу производится угловым редуктором, состоящим из пары "конических шестерен со спиральными зубьями, имеющих передаточное отношение 2,273 и установленных в картере из магниевого сплава. Аналогичные механизмы ранее были применены на ЗИЛ-В5Л и ЗИЛ-135ЛМ.
К фланцу вала ведущей шестерни передней бортовой передачи (левой и правой) крепится барабан ручного тормоза, а передняя левая бортовая передача снабжена специальным угловым редуктором для привода датчика пути навигационной системы.
Средние бортовые передачи связаны с редукторами неуправляемых колес валами, шлицевые концы которых соединены с ведомыми шестернями бортовых передач и ведущими шестернями колесных редукторов.
Передние и задние бортовые передачи связаны с редукторами колес с помощью валов, концы которых снабжены шарнирами равных угловых скоростей типа «Рцеппа». Все бортовые передачи крепятся болтами к кронштейнам подвески колес.
Конечным звеном в передаче тягового усилия от силовой установки к колесным движителям стали колесные редукторы заимствованные без изменении от армейского ЭИЛ-135Л.
Колесный редуктор представляет собой установленную в литом картере пару прямозубых цилиндрических шестерен с передаточным отношением 3,73. В шлицевом отверстии ведущей шестерни редуктора управляемого колеса установлен конец вала-чашки шарнира равных угловых скоростей «Рцеппа». Колесный редуктор соединен с бортовой передачей шлицевым валом, установленным для управляемых колес между шарнирами «Рцеппа» редуктора и бортовой передачи, а для неуправляемых колес – непосредственно между ведомой шестерней бортовой передачи и ведущей шестерней редуктора. Редуктор управляемого колеса соединен с опорой подвески шкворнем, тогда как редуктор неуправляемого колеса имеет жесткое крепление к раме. Для защиты шарниров «Рцеппа» от грязи служат гофрированные чехлы.
Установка колесных редукторов позволила уменьшить размеры бортовых передач и карданных шарниров привода колес. В то же время величина дорожного просвета увеличилась.
Почему же конструкторы СКБ прибегли к редко применяемой схеме с бортовой раздачей потока мощности?
Кроме того, что определенное число узлов и агрегатов было серийного изготовления, такое решение наиболее подходило для равномерного расположения осей на базе и давало лучшие компоновочные решения автомобиля в целом, т. к. освобождалась средняя часть шасси для размещения силовой установки, кранового механизма и опорных устройств, уменьшилась без изменения дорожного просвета погрузочная и общая высота машины. Последнее обстоятельство имело особое значение ввиду необходимости авиатранспортировки.
Поскольку колеса каждого борта имели жесткую кинематическую связь, то при блокировке дифференциала в раздаточной коробке все колеса вращались с одинаковой скоростью без малейшего пробуксовывания, что в значительной мере повышало проходимость на бездорожье.
Двигатель и силовая передача с общим диапазоном передаточных чисел трансмиссии 209 обеспечивали автомобилю широкий диапазон рабочих скоростей (от 0,7 до 69 км/ч) и тяговых усилий, необходимых для уверенного движения в общетранспортном потоке и при транспортировке спускаемого аппарата – по пересеченной местности.
Для лучшей маневренности
Одинаковое расстояние между осями ПЭУ вызвало потребность сделать управляемыми колеса двух первых или первой и третьей оси. Специалисты выбрали второй вариант. Такая схема управления с поворотом колес во взаимнопротивоположных направлениях имеет неоспоримые преимущества. Радиус машины по оси переднего внешнего колеса не превышал 9,8 (внешний габаритный радиус поворота около 11 м). Повороты управляемых колес на относительно небольшие углы давали возможность сделать раму более широкой, что весьма желательно для увеличения ее прочности и жесткости. Вместе с тем при повороте на деформируемых поверхностях, таких как снег, песок, переувлажненный грунт, существенно снижается сопротивление движению ввиду того, что задние управляемые колеса катятся по колее, проложенной передними колесами. Например, радиус поворота ПЭУ был меньше, чем у более короткого на 2,4 метра трехосного ЗИЛ-157К.
Максимальный угол поворота внутренних колес равен 17° – для задних и 18° – для передних колес. Разные углы поворота передних и задних колес учитывают увод колес, вызванный эластичностью шин, и обеспечивают правильную кинематику при движении на повороте.
Рулевое управление состоит из передней и задней трапеций, связанных соответственно с рулевым механизмом и между собой системой продольных и перечных тяг, шарнирно соединенных с маятниковыми рычагами, которые установлены на раме. Для уменьшения усилия, которое водитель должен приложить к рулевому колесу, и смягчения ударов, передаваемых на руль от колес при езде по неровной дороге, служат воздействующие на переднюю и заднюю рулевые трапеции исполнительные гидроцилиндры, связанные магистралями с общим управляющим клапаном и гидронасосом. Насос приводится в движение с помощью клиноременной передачи от коленвала двигателя.
Рулевой механизм типа глобоидальный червяк – трехгребневый ролик, имеющий среднее передаточное отношение 23,5. Он своим картером крепится к раме, а рулевой колонкой – к поперечине щитка приборов. При повороте руля сошка рулевого механизма перемещает золотник клапана управления и направляет рабочую жидкость от насоса к исполнительным цилиндрам.
Для снижения скорости движения автомобиля в тяжелых условиях, быстрой остановке и удержании его на стоянке ПЭУ-1 оборудовалась барабанными рабочими и стояночными тормозами с пневмогидравлическим и механическим приводами соответственно. Создание необходимых тормозных усилий достигается использованием энергии сжатого воздуха, а сила к тормозному механизму передается жидкостью.
Торможение осуществляется сжатым воздухом, нагнетаемым в пару воздушных баллонов компрессором, приводимым от двигателя. Система оснащена пневмоусилителем, который соединен с баллонами тормозным краном. Управляется тормозной кран педалью, связанной с ним механическим приводом. При нажатии на педаль сжатый воздух поступает в пневмоусилитель, создающий нужное давление в главном цилиндре гидросистемы привода тормозов. Главный цилиндр связан системой трубопроводов с колесными гидравлическими цилиндрами, поршни которых прижимают колодки к тормозным барабанам.
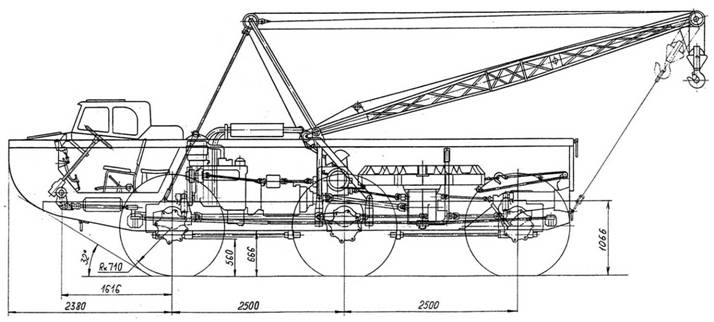
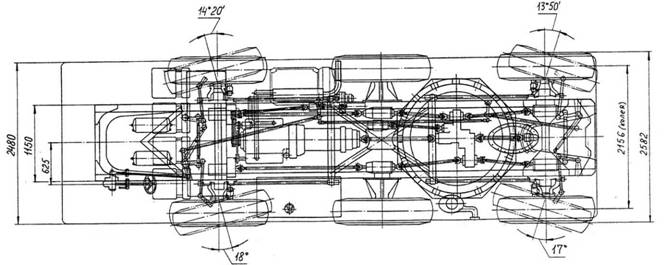
Компоновка ПЭУ-1 (ПЭУ-IP), Вид сбоку. Снизу – вид в плане.

Машина уверенно брала крутой подъем на выходе из водоема

Амфибия быстро входила в воду

Машине не были страшны, рвы и канавы шириной более 2 метров

Вездеход без особого труда двигался по песчанной поверхности
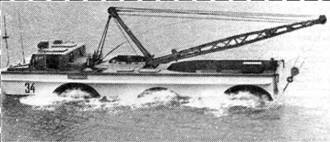
ПЭУ-1 обладала хорошими водоходными качествами

Используя систему регулирования давления воздуха в шинах, ПЭУ могла преодолевать болото глубиной 0,6-0,8 м
Амфибия была способна транспортировать груз по воде при высоте волн до 0.5 м

Машина не опрокидывалась на косогоре крутизной 22°
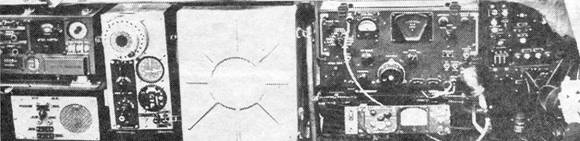
Все пространство на панели приборов, включая правый борт, было занято пультами управления связной, пеленгаицонной и радионавигационной системами

Эвакуация членов экипажа приводнившегося СА.
Рабочие тормоза герметичные, установлены на понижающих редукторах всех колес.
Стояночный колодочный тормоз смонтирован на передних бортовых передачах и его привод осуществляется из кабины рычагом через систему тяг.
Многие элементы тормозной системы унифицированы с аналогичными узлами автомобилей ЗИЛ-130 и ЗИЛ-135Л.
Пневматическая система используется также для регулирования давления воздуха в шинах, приведения в действие стеклоочистителя, звукового сигнала, тормоза лебедки и термостата жалюзи системы охлаждения двигателя.
Исходя из того, что характерными условиями движения ПЭУ во время поиска и эвакуации космических объектов и их экипажей будут разбитые дороги, а также полное бездорожье, качество разрабатываемой подвески не должно ограничивать среднюю скорость, которую позволяют развить удельная мощность двигателя и сила тяги по сцеплению колес машины с дорогой. При этом подвеска должна иметь достаточную прочность и надежность в сложных эксплуатационных условиях, быть простой в изготовлении и хорошо приспособленной к ремонту.
Руководствуясь этими соображениями, выбор был остановлен на схеме подвески с частичным подрессориванием. Ее особенность состояла в том, что управляемые передние и задние колеса оснащаются независимой подвеской, тогда как средние жестко прикреплены к раме. Независимая подвеска при одинаковых параметрах упругого элемента позволяет получить меньшие веса неподрессоренных масс, большие динамические прогибы и запас потенциальной энергии, чем зависимые подвески неразрезных осей. В целом, не влияя на плавность хода автомобиля, неподрессоренная средняя ось является конструктивно более простой и позволяет воспринимать значительные весовые нагрузки, в случае преодоления машиной профильных препятствий, когда передние или задние колеса отрываются от опорной поверхности.
Независимая подвеска управляемых колес включает поперечные вильчатые рычаги, выполняющие роль направляющего устройства, торсионный вал, используемый в качестве упругого элемента, и амортизатор (от МАЗ-500) для быстрого гашения колебаний.
Для получения высокой точности кинематики качания колеса, все составляющие части подвески собираются на специальном кронштейне (плите), который крепится к раме.
Вильчатые рычаги шарнирно связаны с кронштейном и картером колесного редуктора. Поворот колес обеспечивается благодаря тому, что верхний рычаг соединен с колесным редуктором с помощью шарового пальца, а нижний рычаг – посредством оси и шкворневого узла.
По сравнению с винтовыми пружинами торсион обладает большей энергоемкостью и требует менее сложных направляющих устройств.
Торсионный вал имеет две шлицевые головки, одна из которых входит в шлице- вое отверстие втулки нижнего рычага подвески, а другая – в такое же отверстие втулки опоры торсиона, закрепленной на лонжероне рамы.
Телескопический амортизатор двойного действия с помощью резиновых втулок соединен с плитой и нижним рычагом подвески.
Подвеска обеспечивает перемещение колеса вверх на 170 мм.
Колеса средней оси крепятся к лонжеронам рамы посредством мощных кронштейнов. Упругим элементом неуправляемых колес являются только пневматические шины.
Как трактор помог автомобилю
Хорошо известно, что показатели проходимости внедорожного автомобиля во многом зависят от размеров, типа, конструкции колес и шин, а также возможности изменять в шинах внутреннее давление с помощью специального устройства. Кроме того, конструкция колесного движителя оказывает существенное влияние на топливную экономичность, плавность хода и устойчивость движения.
Для получения дорожного просвета, достаточного при движении машины по мягким фунтам (переувлажненный фунт, снег), и поверхности, насыщенной профильными препятствиями (бревна, камни, пни), а также для уменьшения склонности к буксированию необходимы были колеса диаметром не менее 1500 мм. Но если изготовление ободов и колесных дисков не являлось проблематичным, то автомобильные шины соответствующих размеров в то время отечественная промышленность не выпускала. Но все же выход был найден. Изучение номенклатуры продукции, выпускаемой шинными заводами, подсказало мысль использовать для этой цели шины, применяющиеся на колесных сельскохозяйственных тракторах. Благо, что геометрия соответствовала исходным параметрам. Наиболее подходящими оказались шины 15x30 (модель Я-175) производства Ярославского шинного завода. Наружный диаметр покрышки составлял 1523 мм, а ее ширина 420 мм. С самого начала всем было ясно, что эта мера временная, поскольку тракторная шина имеет ограниченные возможности и не в состоянии охватить весь спектр эксплуатационных условий, для которых предназначалась ПЭУ.
Камерная шина Я-175 была рассчитана на работу со скоростями, не превышающими 20 км/ч, т. к. в противном случае ее долговечность резко сокращалась. Другой особенностью было использование протектора типа косая «елка», в котором отсутствует сплошной пояс в центре беговой дорожки, а также то, что ребра протектора расположены под углом 45°. Этот рисунок с глубоким протектором дает хорошие результаты при движении по слабым влажным фунтам и рыхлому снегу. В то же время из-за отсутствия центральной сплошной полосы при качении по дорогам с твердым покрытием колеса с такими шинами испытывают периодические пульсирующие нафузки, что приводит к быстрому расслоению и порче покрышки, а также отрицательно отражается на долговечности трансмиссии. Еще одно обстоятельство, которое не могло остаться незамеченным, – узкий диапазон изменения внутреннего давления в шине. Его максимальное значение 1,4 кг/см2 и минимальное – 1,1 кг/см2 наряду с многослойным каркасом покрышки и нерасчлененными ребрами протектора снижало эффективность применения системы регулирования давления воздуха в шинах.

На твердой дороге скорость достигала 68 км/ч
Погрузка спускаемого аппарата производилась краном через проем заднего откидного борта
Поэтому почти сразу СКБ ЗИЛ совместно с Научно-исследовательским институтом шинной промышленности (НИИ ШП) и Днепропетровским шинным заводом начали работы по созданию специальных шин с регулируемым давлением воздуха в них. Эти шины должны были отличать уменьшенное в 2,5-3 раза число слоев корда в каркасе, использование мягких резиновых прослоек между слоями корда, достаточная прочность каркаса при движении с давлением 2-2,5 кг/см2 , применение специального рисунка протектора, допускающего большие деформации шины (до 40% высоты профиля) без возникновения значительных напряжений в ней. Рисунок протектора при этом должен удовлетворять требованиям к шинам автомобиля высокой проходимости и обеспечить хорошую самоочищаемость.
Напряженные усилия специалистов привели к разработке и промышленному выпуску камерных 8-слойных шин 1525x400-/68 (модель ИД-15), которые по всем статьям превзошли своих предшественниц. Новая шина наружным диаметром 1515 мм и шириной 400 мм могла работать с внутренним давлением воздуха от 0,25 до 2,5 кг/см2 , ее радиальная упругость способствовала улучшению плавности хода автомобиля, протектор с крупными широкорасставленными грунтозацепами и поперечными канавками на них, уменьшая внутренние потери, обеспечивал малое сопротивление качению на твердых дорогах и отличное самоочищение от забивания грязью и снегом.
Колеса, на которые монтировались шины Я-1/5 и ИД-15, комплектовались разъемными ободьями, состоящими из наружной и внутренней частей, скрепленных между собой и дисками 24 болтами и гайками. Размерность обода для первой шины 286-768, для второй 420-762. Примечательно, что обе части обода изготовлены из стеклопластика, а колесные диски, которыми колесо крепилось к ступице, выполнены стальными. Чтобы разместить колесный редуктор, обод сделан несимметричным, его внутренняя часть вдвое шире наружной.
Использование независимой подвески, колесных редукторов и колес большого размера обеспечило дорожный просвет у ПЭУ- 560 мм под рычагами подвески и 660 мм под днищем корпуса.
Любой автомобиль высокой проходимости, а тем более амфибию невозможно представить без централизованной системы регулирования давления воздуха в шинах. Ведь именно плавающие колесные машины американцы впервые оснастили подобным устройством, позволившим преодолевать топкую прибрежную полосу после форсирования водной преграды во время проведения боевых операций второй мировой войны.
Система регулирования давления воздуха в шинах (СРДВШ) является одним из наиболее действенных и универсальных средств, обеспечивающих приспособляемость ходовой части полноприводного автомобиля и изменяющимся дорожным условиям и повышает его проходимость.
Шина в зависимости от величины давления воздуха в ней в 2-4 раз изменяет площадь опоры на фунт, снижая в 3-5 раза удельное давление в пятне контакта, что благоприятно отражается на сцепных и опорных качествах вездехода. Регулирование давления воздуха в шинах во время движения автомобиля позволяет водителю достигать оптимального сочетания сопротивления движению и силы тяги.
Применение СРДВШ существенно повысило подвижность ПЭУ в условиях бездорожья (на снежной целине, пахоте, песке, заболоченных участках, грунтовых дорогах, в период осенней и весенней распутицы), обеспечила движение машины при проколах одного из колес без его смены, дало возможность выравнивать корпус автомобиля при работе грузоподъемного крана на уклонах, наблюдать за величиной давления воздуха и регулировать его в зависимости от свойств опорной поверхности.
Испытания показали, что большее увеличение тягового усилия в 1,5-2 раза было достигнуто на сухом песке и снежном покрове, а наименьшее сопротивление качению – на рыхлых и насыщенных водой фунтах.
Водитель, воздействуя на кран управления давлением, который вместе с шинными кранами прикреплен на щитке у левого борта, имеет возможность регулировать давление воздуха в шинах, не выходя из кабины. При перемещении рычага крана управления из нейтрального в положение «Накачка» система регулирования воздуха соединяется с баллонами пневматической системы тормозов, и воздух поступает в шины. Перевод рычага в положение «Спуск» приводит к тому, что СРДВШ соединяется с атмосферой, обеспечивая выпуск воздуха из шин.
Шинные краны, установленные в системе после крана управления, позволяют регулировать давление воздуха раздельно в шинах правого и левого борта, а запорные краны, расположенные в крышках тормозных барабанов колес, дают возможность отключить любую шину от СРДВШ, например, при ее повреждении.
Уже в ходе эксплуатации поисково-эвакуационной установки выяснилось, что малая скорость снижения давления воздуха в шинах от номинальной величины до минимальной, обусловившая несвоевременное использование СРДВШ, отрицательно сказывается на средней скорости движения автомобиля и вероятности успешного преодоления тяжелых участков пути. Имеющийся опыт показал, что от момента обнаружения труднопроходимого участка до начала движения по нему снизить давление до оптимальной величины без остановки машины не удается. Это объяснялось тем, что для изменения давления с 2,0 кг/см2 до 0,5 кг/см2 необходимо не менее 5-6 минут. Остановка же автомобиля для выполнения этой процедуры увеличивает время выполнения фанспортной работы, а давление по болотистым почвам, переувлажненному фунту или глубокому снегу с давлением, не соответствующем оптимальному, часто ведет к застреванию машины.
Исследования с целью увеличения скорости выпуска воздуха из шин показали, что сокращение в несколько раз времени, необходимого для снижения давления в шинах большого объема, возможно посредством установки в магистралях воздуховодов, идущих к шинам клапанов быстрого выпуска (клапаны управления давлением), изобретенных специалистами СКБ ЗИЛ. Наличие таких устройств снизило время изменения давления воздуха в шинах ПЭУ размерностью 1525x400-768 от номинального до 0,5 кг/см2 до 1 мин. Это в 4-6 раз меньше подобного показателя, достигнутого на отечественных трехосных полноприводных автомобилях ЗИЛ-131, УРАЛ-375, КРАЗ-255Б и лучших зарубежных вездеходах.
Экспериментально установлено, что при эксплуатации ПЭУ на дорогах с твердым покрытием наивыгоднейшие значения давления воздуха в шинах 2,0 кг/см2 , на тяжелых грунтовых дорогах в период распутицы – 0,75-0,5 кг/см2 , на снегу, песке, заболоченной местности – 0,5-0,25 кг/см2 .
Совершенствование СРДВШ также сократило время, необходимое для увеличения давления в шинах от 0,5 до 1 кг/см 2 с 8 до 5 минут. Впервые в практике отечественного автостроения несущая система амфибии была выполнена в виде сварной алюминиевой рамы, связанной резьбовыми соединениями с корпусом, отформированным из полиэфирной смолы, армированной стекловолокном.
Рама, сваренная из профилей алюминевого сплава повышенной коррозионной стойкости, является основным силовым элементом, воспринимающим нагрузки, действующие на автомобиль. На ней установлены двигатель с гидропередачей, агрегаты трансмиссии, подвески, грузоподъемное устройство, ложе для размещения СА, рулевое управление, водоходный движитель и другое оборудование.
Необходимую прочность рамы на изгиб и кручение при ее минимальном весе создают лонжероны, изготовленные из специального швеллерного профиля переменного сечения, соединенные между собой поперечинами при помощи косынок. Крестообразный раскос, приваренный в средней наиболее нагруженной части рамы, облегчает приспособляемость подвески при движении транспортного средства в условиях (грунтовые дороги с разбитой колеей, пересеченная местность), вызывающих кручение рамы. В СКБ была проведена огромная экспериментально-исследовательская работа по технологии сварки нагруженных конструкций из алюминиевых сплавов, к каковым относится и рама.
По воде аки по суху
Корпус ПЭУ представляет собой стеклопластиковую водоизмещающую оболочку, обладающую нужным запасом плавучести и защищающую экипаж, агрегаты и грузы от воздействия внешней среды.
Геометрические размеры и форма корпуса выбраны таким образом, чтобы, с одной стороны, иметь достаточную продольную и поперечную устойчивость при движении по воде со спускаемым аппаратом на борту, с другой – снизить, насколько это возможно, сопротивление воды. Для упорядочения обтекания носовой части корпуса она имеет криволинейную поверхность и снабжена продольными ребрами (на первом образце их было два, на последующих увеличили до пяти), которые к тому же играют роль защитных элементов при швартовке.
Большое значение имели результаты испытаний морской 20-тонной амфибии ЗИЛ-135П, изготовленной в 1965 г. Ее несущий корпус был сделан из стеклопластика, который полностью доказал свою состоятельность как конструкционный материал, обладающий высокими прочностными свойствами.
Носовой отсек корпуса использован для размещения экипажа, радиотехнической аппаратуры и пультов управления. Сверху отсек закрывается откидным колпаком.
Пространство от носа до колпака закрыто палубой, в которой имеется три люка для обслуживания аппаратуры. В отсеке сосредоточено управление машиной и ее оборудование. В кабине установлены четыре одноместных сиденья для членов экипажа, за которыми располагаются блоки радионавигационного комплекса (РНК) и съемные носилки. Для доступа к носилкам и блокам сидения их спинки сделаны откидными. Носилки также откидываются вверх и закрепляются в этом положении. Подушки сидений и матрас носилок изготовлены из поролона и обтянуты специальным материалом. Посадка экипажа в машину осуществляется через 2 люка (на первых образцах – один), размещенных на крыше. Задние боковые окна могут поворачиваться вперед на 180° и фиксироваться. При монтаже приборов, погрузки носилок и авиатранспортировке колпак снимается с предварительным отсоединением штепсельных разъемов. Кабина снабжена двумя отопителями, работающими от системы охлаждения двигателя. Сзади отделения экипажа находится мотоотсек, закрытый палубой с решетками и откидными крышками. Далее до конца корпуса простирается грузовое отделение, в торцовой части которого находится откидной борт с уплотнением от проникновения воды на плаву. В промежуточном положении борт фиксируется цепью.
Почти по всей длине обоих бортов установлены откидные брызговики, позволяющие производить швартовку амфибии и обеспечивающие свободный проход в грузовое отделение из кабины во время нахождения на плаву.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Ад на земле
Ад на земле Впервые эффект огненного смерча проявился при бомбардировке Гамбурга в июле 1943 года. Двадцать квадратных километров города сгорели в едином мощном костре. Проявление смерча было настолько ужасным, что начальник гамбургской полиции распорядился провести
На земле Поднебесной
На земле Поднебесной О деятельности советской внешней разведки в Европе и Америке известно достаточно много. Но Россия — государство, расположенное не только на территории Европы, но и Азии, и протяженность азиатской границы России значительно больше европейской. Это
На земле обетованной
На земле обетованной
На финской земле
На финской земле Интересные воспоминания о своей первой встрече с Павлом Анатольевичем Судоплатовым оставила известная советская разведчица и не менее популярная детская писательница Зоя Ивановна Рыбкина-Воскресенская (оперативный псевдоним «Ирина»).С 1935 года по 1939
«Вездеход» Пороховщикова
«Вездеход» Пороховщикова Вот уже много лет в нашей стране в различной литературе и телепередачах об истории танка пишут и говорят о том, что первую в мире боевую гусеничную машину построили именно у нас — это «Вездеход» конструкции А. А. Пороховщикова. При этом обычно
Закон о земле
Закон о земле Приказ Главнокомандующего Вооруженными силами на Юге России о земле от 25 мая 1920 годаСо всеми дополнениями:1. Правительственное сообщение по земельному вопросу.2. Приказ о земле от 25 мая 1920 года.3. Правила о передаче распоряжением Правительства казенных,
В воздухе и на земле
В воздухе и на земле Опробование двигателя на новом Fw 190А-4. Истребительная эскадра I./JG 54, Восточный фронт,
38. На югославской земле
38. На югославской земле Тяжелая и славная судьба выпала на долю Югославии в минувшей мировой войне. Ее народы решительно вступили в борьбу с гитлеризмом, подняв восстание в ответ на оккупацию страны немцами и итальянцами. Миллион триста тысяч убитых — такую цену за
На литовской земле
На литовской земле В составе 80–го стрелкового корпуса части дивизии в течение недели совершали форсированный марш по глубокой грязи, бездорожью и болотам Прибалтики на расстояние свыше 200 километров. Двигались по маршруту Рига, Селеки, Машаны, Галднеки, Яунземели,
Рай на Земле?
Рай на Земле? На гробнице Бабура, которая находится в одном из садов, заложенных императором Великих Моголов в Кабуле, есть эпитафия, которая вдохновляет каждого, кто пришел поклониться памяти этого великого государственного деятеля: «Если есть на Земле рай, то он здесь,
На земле Штрауса
На земле Штрауса В 1954 году, после окончания академии Советской армии подполковника Виктора Бочкарева назначают старшим помощником военного атташе Советского Союза в Австрии. К тому времени он уже был опытным разведчиком. За спиной — война, служба в разведуправлениях
ТАМ, ГДЕ ПЕХОТА НЕ ПРОЙДЕТ… или Как арктический вездеход повергнул в шок ведущие разведки мира
ТАМ, ГДЕ ПЕХОТА НЕ ПРОЙДЕТ… или Как арктический вездеход повергнул в шок ведущие разведки мира Снегоход ЗИЛ-Э167В середине 60-х годов военные ведомства ряда стран НАТО были неприятно удивлены, получив донесения разведывательных служб, что в Советском Союзе изготовлено
На большой земле
На большой земле Красноармеец действительно вернулся через час. С его помощью разведчики добрались до райцентра Ульяново. Ночевали в парткабинете райкома партии.Утром Валя пошла в разведотдел. Встретили ее там сухо. Сведения о Белых Берегах восторга не вызвали, при
НА СЕВАСТОПОЛЬСКОЙ ЗЕМЛЕ
НА СЕВАСТОПОЛЬСКОЙ ЗЕМЛЕ Прекрасный белый город, еще не опаленный жарким дыханием войны, представился Людмиле во всей своей строгой, воинственной красе. Он раскинулся на берегах нескольких бухт, и вход в главную из них охраняли два старинных форта: Константиновский и