1. УСТРОЙСТВО И ФУНКЦИОНИРОВАНИЕ ПЗРК
1. УСТРОЙСТВО И ФУНКЦИОНИРОВАНИЕ ПЗРК
История создания переносных зенитных ракетных комплексов (ПЗРК) берёт свое начало с 60-х годов ХХ века. В то время на вооружении войск ПВО Сухопутных войск СССР в основном состояли зенитные пулемётные установки (ЗПУ) и зенитные артиллерийские комплексы (ЗАК), которые нуждались в средствах буксирования, имели значительное время развёртывания, заряжания, время реакции и цикл стрельбы, малую вероятность поражения. Кроме того, они также имели значительные массогабаритные характеристики, были заметны на поле боя, имели плохие манёвренные возможности.
Основная задача вышеперечисленных средств ПВО Сухопутных войск состояла в том, чтобы не допустить выполнения воздушным противником полётного задания по нанесению авиационного удара, а в идеальном случае — нанести повреждения или уничтожить средства воздушного нападения противника.
Возникла необходимость создания принципиально нового средства ПВО, которое находилось бы непосредственно в боевых порядках прикрываемых общевойсковых подразделений и не имело бы вышеупомянутых недостатков.
Решение задачи по созданию нового комплекса было поручено «Коломенскому ОКБ машиностроения». Техническое задание требовало создания дешёвого, технологичного, простого в обслуживании и изучении, малогабаритного, малозаметного зенитного ракетного комплекса, находящегося непосредственно в боевых порядках прикрываемых частей и подразделений. Комплекс должен применяться одним стрелком по всем типам воздушных целей с любой неподготовленной стартовой позиции, с земли, объектов автомобильной и бронетанковой техники, железнодорожных платформ, с места и в движении, с воды, со средств переправы, с крыш зданий и т. д., с соблюдением основных требований безопасности. Дальность стрельбы комплекса должна была составлять до 3000 м, а высота поражения до 1500 м.
За основу построения системы управления комплекса был принят ПТУР БМП, который наводился через оптический прицел по проводам. Но этот метод не обеспечивал решения поставленной задачи. Было принято революционное решение по созданию оптической головки самонаведения (ОГС), работающей в инфракрасном (тепловом) диапазоне волн.
Решение этой задачи было поручено киевскому объединению «АРСЕНАЛ» и «Ленинградскому оптико-механическому объединению (ЛОМО)», но за основу, была принята ОГС объединения «АРСЕНАЛ» как наиболее отвечающая техническому заданию.
Разработка комплекса была поручена коллективу инженеров, которым руководил главный конструктор по фамилии Непобедимый. В результате в ОКБ создан планер ракеты по схеме «утка» (рули впереди относительно центра масс, а крылья — сзади), система управления, двигательная установка, наземный блок питания, пусковой механизм, пусковая труба, переносные пассивный радиопеленгатор и наземный радиолокационный запросчик, средства технического обслуживания, учебно-тренировочные средства.
И в 1967 г., пройдя успешные государственные испытания, комплекс был принят на вооружение с индексом 9К32 «Стрела-2».

Рис. 1. ПЗРК 9К32 «Стрела-2»
Таблица 1
Основные тактико-технические характеристики
1 Зона поражения при стрельбе вдогон: по дальности, м 500–3200 по высоте, м 30–2500 2 Максимальная скорость полёта поражаемого летательного аппарата, м/с 220 3 Эффективность стрельбы вдогон одной ЗУР 0,19–0,25 4 Масса комплекса в боевом положении, кг 14,5 5 Масса ЗУР 9М32, кг 9,15 6 Масса боевой части, кг 1,17Боевое крещение комплекс принял во время арабо-израильского конфликта в 1968 г. перед очередным, ожидаемым, налётом стрелки-зенитчики занимали свои стартовые позиции. Для противника противодействие было настолько неожиданным и ошеломляющим, что в течение нескольких дней налёты ВВС Израиля не осуществлялись. По неофициальным данным, комплексом было уничтожено до 20–30 % самолётов, участвовавших в налёте.
Комплекс подтвердил фамилию своего главного конструктора — Непобедимый, и своё название «Стрела» — невидимая, точная, легкая. Летчики противника не видели привычных позиций ПВО и не могли понять, какими средствами сбивались самолеты, тем более что основным видом стрельбы комплекса была стрельба на догонных курсах. Ракета попадала в сопло или в срез сопла самолёта, но иногда ракета выдувалась реактивной струёй двигателя. Одна из ракет 9М32 попала в сопло самолёта, не взорвалась, а зацепилась в нём своими аэродинамическими поверхностями. Она была успешно доставлена на аэродром противника, после чего попала в руки специалистов и была разобрана. Вражеской стороной был понят принцип работы ракеты и приняты меры по защите самолётов от ПЗРК — созданы специальные тепловые ловушки (ЛТЦ — ложные тепловые цели). Так был раскрыт секрет ранее неизвестного оружия.
Основными недостатками комплекса «Стрела-2» являлись малая дальность стрельбы (2000–2500 м), низкая помехозащищённость и вероятность поражения.
Следующим этапом создания ПЗРК явился комплекс «Стрела-2М». Внешне он не отличался от своего предшественника, но претерпел ряд существенных доработок. Возникшие трудности в вопросе увеличения дальности стрельбы и точности поражения решили с помощью установления датчика компенсации продольных и поперечных колебаний ракеты в полёте, который бы выдавал дополнительный сигнал в автопилот, пропорциональный этим колебаниям. Так же была применена более чувствительная головка самонаведения.

Рис. 2. ПЗРК 9К32М «Стрела-2М»
Таблица 2
Основные тактико-технические характеристики
1 Зона поражения при стрельбе вдогон: по дальности, м 500–4000 по высоте, м 30–2700 2 Максимальная скорость полёта поражаемого летательного аппарата, м/с 260 3 Эффективность стрельбы вдогон одной ЗУР 0,22–0,25 4 Масса комплекса в боевом положении, кг 15 5 Масса ЗУР, кг 9,15 6 Масса боевой части, кг 1,17

Рис. 3. ПЗРК 9К34 «Стрела-3»

Рис. 4. ПЗРК 9К310 «Игла-1»
Средства воздушного нападения продолжали развиваться, развивались и средства борьбы с ними. Следующим этапом в совершенствовании ПЗРК был этап создания переносных зенитных ракетных комплексов «Стрела-3» и «Игла-1».
В этих комплексах был применён новый наземный блок питания, включающий в себя сам источник питания и баллон с газом, новая более чувствительная ГСН с охлаждаемым фотоприёмником, новая двигательная установка, после чего существенно увеличилась вероятность поражения, помехозащищённость, скорость поражаемых воздушных целей, скорость полёта самой ракеты.
Самое главное, что эти комплексы получили возможность вести стрельбу не только на догонных, но и на встречных курсах.
Таблица 3
Основные тактико-технические характеристики
Комплекс Стрела-3 Игла-1 1 Калибр ракеты, мм 72 72 2 Длина ракеты, мм 1427 1427 3 Зона поражения по дальности, м 500–4000 500–5000 4 Зона поражения по высоте, м 30–2700 10–3500 5 Вероятность поражения истребителя одной ЗУР 0,3–0,33 0,4 6 Максимальная скорость поражаемых целей, м/с (навстречу/вдогон) 260/310 300/360 7 Скорость полёта ЗУР, м/с 470 560 8 Масса ракеты, кг 10,3 10,8 9 Масса боевой части, кг 1,17 1,27 10 Масса пускового устройства, кг 2,95 3 11 Масса ПРП 9С13, кг 2,5 2,5 12 Масса НРЗ, кг 2,3 2,3 13 Масса комплекса в боевом положении, кг 16 18,2 14 Время подготовки к пуску ракеты, с 10 13Комплексом нового — третьего — поколения до сих пор считается переносной зенитный ракетный комплекс 9К38 «Игла».
1.1. Общие сведения о ПЗРК 9К38 «Игла»
Переносной зенитный ракетный комплекс 9К38 «Игла» является средством непосредственного прикрытия войск и объектов от ударов средств воздушного нападения (СВН) противника. Он состоит на вооружении зенитных отделений, зенитных ракетных взводов и батарей, входящих в состав зенитных дивизионов, а также других подразделений родов войск видов Вооружённых Сил РФ с 1983 г.

Рис. 5. ПЗРК 9К38 «Игла»
Комплекс предназначен для поражения реактивных, турбовинтовых и винтомоторных самолётов, а также вертолётов на встречных и догонных курсах в условиях естественных (фоновых) и искусственных тепловых помех при визуальной видимости цели.
Таблица 4
Тактико-технические характеристики
1 Максимальная высота поражаемых целей на встречных/догонных курсах, м: реактивные самолёты 2000/2500 поршневые самолёты и вертолёты 3000/3500 2 Минимальная высота поражаемых целей, м 10 3 Максимальный параметр поражаемых целей на встречных/догонных курсах, м: реактивные самолёты 2000/2500 поршневые самолёты и вертолёты 2500/3000 4 Скорость поражаемых целей на встречных/догонных курсах, м/с 360/320 5 Наклонная дальность поражения, м от 500 до 5000 6 Время перевода из походного положения в боевое, с не более 13 7 Время готовности к пуску (после выхода на режим наземного источника питания), с не более 5 8 Диапазон рабочих температур, °С от –44 до +50Состав комплекса
1. Боевые средства
• Зенитная управляемая ракета 9М39 представляет собой реактивный летательный аппарат, снабжённый двухступенчатой твёрдотопливной двигательной установкой, бортовой аппаратурой управления полётом по методу пропорционального сближения за счёт пассивного оптического самонаведения и боевой частью с контактным взрывателем.

Рис. 6. ЗУР 9М39
• Пусковая труба 9П39 (9П39-1) обеспечивает прицельный и безопасный пуск ракеты, а также является направляющим устройством при пуске и одновременно служит контейнером при эксплуатации ракеты.

Рис. 7. Пусковая труба 9П39
• Наземный источник питания 9Б238 (одноразового действия) предназначен для снабжения хладагентом ОГС и обеспечения электроэнергией комплекса в период подготовки к пуску ракеты.
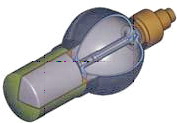
Рис. 8. НИП 9Б238
• Пусковой механизм 9П516-1 (без НРЗ-9П516) предназначен для подготовки к пуску и пуска ракеты по выбранной цели для обстрела. Обеспечивает звуковую сигнализацию качества захвата цели и её принадлежности, а также исключает обстрел цели с принадлежностью «свой» при использовании НРЗ 1Л-14.
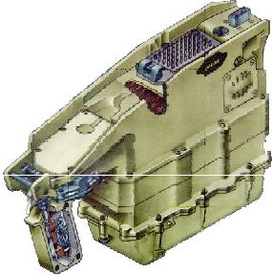
Рис. 9. Пусковой механизм 9П516-1
2. Средства приёма целеуказания и связи
• Переносной электронный планшет 1Л15-1 обеспечивает своевременное оповещение стрелка-зенитчика о месте нахождения и направлении движения воздушных целей (от 1 до 4), индикацию траектории перемещения и принадлежности целей в радиусе 12,5 км. Информацию о целях в виде кодограммы ПЭП получает на встроенный радиоприёмник с батарейного командного пункта (БКП) или командного пункта (КП) зенитного дивизиона.

Рис. 10. ПЭП 1Л15-1
• Радиостанция Р-157 обеспечивает приём оповещения о воздушной обстановке и управление огнём стрелков-зенитчиков. Вместо указанных средств связи могут использоваться переносные аналоги.

Рис. 11. Радиостанция Р-157
3. Средства технического обслуживания
• Подвижный контрольный пункт ПКП 9В866 и контрольно-проверочная аппаратура 9Ф719 служат для проведения технического обслуживания и регламентных работ боевых средств комплекса в полевых условиях и на базах (арсеналах).



Рис. 12. ПКП 9В866 с КПА 9Ф719
4. Учебно-тренировочные средства
• Унифицированный полевой тренажер 9Ф635 предназначен для обучения и комплексных тренировок одного, двух или трёх стрелков-зенитчиков боевой работе и стрельбе по имитированным и реальным воздушным целям в реальной фоновой обстановке с обеспечением объективного контроля действий обучаемых.
• Учебно-тренировочный комплект 9Ф663 предназначен для психофизиологической подготовки одного или двух стрелков-зенитчиков и выполнения учебно-тренировочных задач на месте и в движении. Обеспечивает имитацию пуска ракеты (болванки) на безопасной площадке.
• Учебно-разрезной макет 9К38УР предназначен для изучения устройства боевых средств комплекса.

Рис. 13. Унифицированный полевой тренажёр 9Ф635

Рис. 14. Учебно-тренировочный комплект 9Ф663

Рис. 15. Учебно-разрезной макет 9К38УР
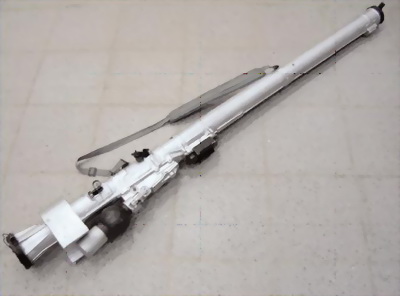
Рис. 16. Габаритно-весовой макет 9К38 ГВМ
• Габаритно-весовой макет 9К38 ГВМ предназначен для обучения и тренировки стрелков-зенитчиков выполнению правил обращения с боевым комплексом, а также выполнению нормативов боевой работы.
• Комплект электрифицированных стендов 2У438 предназначен для изучения устройства боевых средств комплекса, режимов работы и взаимодействия составных частей, а также правил стрельбы и боевой работы.
Принцип работы комплекса
При поступлении команды «К бою!» или самостоятельно после визуального обнаружения цели стрелок-зенитчик занимает стартовую позицию, принимает удобное для стрельбы боевое положение и изготавливается к стрельбе. Определив исходные данные для стрельбы и момент пуска ракеты, он приводит в действие НИП.
После производства накола НИП сжатый газ поступает в фотоприёмник ракеты для охлаждения оптической головки самонаведения. Одновременно срабатывает батарея электропитания, и напряжение с неё поступает в электронные блоки пускового механизма, ракеты и пусковой трубы. Ротор гироскопа ОГС ракеты разгоняется за 5 с до100 об/с и арретируется (электрически стопорится), т. е. происходит согласование оптической оси ОГС ракеты с осью прицела пусковой трубы.
Если стрелок точно сопровождает цель через механический прицел пусковой трубы, а сигнал цели мощнее сигнала фона и помех, то возможно проведение пуска ракеты в одном из двух режимов («Автомат» или «Ручной») путём нажатия на пусковой крючок пускового механизма.
После срабатывания стартового двигателя ЗУР вылетает из пусковой трубы со скоростью до 28 м/с и угловой скоростью вращения до 20 об/с. После удаления ЗУР на безопасное для стрелка-зенитчика расстояние (не менее 5,5 м) срабатывает маршевый двигатель ЗУР, который разгоняет её до скорости 570 м/с и поддерживает эту скорость в полёте. Дальнейшее вращение ракеты на траектории полёта обеспечивается за счёт повёрнутых относительно продольной оси ракеты крыльев и дестабилизаторов.
В момент вылета ЗУР из трубы происходит раскрытие рулей и срабатывание порохового управляющего двигателя, который осуществляет разворот ракеты на начальном участке траектории по командам ОГС. Снимается первая ступень предохранения, а через 1–1,9 с и вторая, после чего боевая часть готова к действию.
В процессе слежения за целью ОГС формирует суммарный командный сигнал, который поступает в рулевой отсек ракеты на рулевые машины и обеспечивает управление ЗУР в полёте.
При попадании ракеты в цель срабатывает взрыватель боевой части, который подрывает боевую часть, а взрывной генератор подрывает остатки топлива двигательной установки.
В случае непопадания ракеты в цель по истечении 14–17 с происходит самоликвидация ЗУР.
Наведение ракеты на цель осуществляется по методу пропорционального сближения, при котором управляющий сигнал пропорционален абсолютной угловой скорости вращения линии визирования ракета-цель. Сущность метода заключается в том, чтобы свести к нулю угловую скорость линии визирования, что обеспечит встречу ракеты с целью в упреждённой точке.
Система управления полётом предназначена для реализации выбранного метода наведения ракеты на цель. В качестве измерителя угловой скорости линии визирования используется одноканальная гироскопическая головка самонаведения. В основу построения бортовой аппаратуры заложен принцип одноканального управления вращающейся ракетой с работающими в релейном режиме рулями, позволяющими, используя вращение ракеты, создавать управляющую силу в любом направлении пространства.
На начальном участке траектории ракета летит не в упрежденную точку, а угловая скорость линии визирования не равна нулю. Оптическая головка самонаведения измеряет эту угловую скорость и пропорционально её величине формирует команду управления, исполняя которую, рули рулевого отсека создают управляющую силу в нужном направлении пространства.
Под действием управляющей силы ракета разворачивается относительно центра масс. Появляющиеся при этом углы атаки и скольжение создают результирующую подъёмную силу, которая изменяет траекторию полёта ракеты таким образом, чтобы свести к нулю угловую скорость линии визирования.
Метод пропорционального сближения обеспечивает попадание ракеты вблизи наиболее теплоконтрастных элементов конструкции цели. При пусках ракет по реактивным самолётам центр попаданий лежит в районе среза сопла двигателя. Однако, конструкция современных самолётов такова, что район среза сопла является малоуязвимой областью для ракеты с боевой частью малой мощности. Для повышения эффективности поражения в ракете предусмотрена схема смещения центра группирования попаданий в направлении полёта самолёта, т. е. в его корпус. Схема смещения вырабатывает дополнительный сигнал, который обеспечивает отклонение ракеты от среза сопла в корпус.
1.2. Устройство и функционирование боевых средств
1.2.1. Зенитная управляемая ракета 9М39
Зенитная управляемая ракета 9М39 является боевым средством ПЗРК 9К38. Она представляет собой боевой реактивный беспилотный управляемый крылатый летательный аппарат, предназначенный для поражения реактивных, турбовинтовых, винтомоторных самолётов и вертолётов в ближней зоне на встречных и догонных курсах в условиях естественных и искусственных тепловых помех при визуальной видимости цели.
При построении ЗУР использованы:
1) планер, выполненный по аэродинамической схеме «утка» с вращающимся вокруг продольной оси корпусом ракеты и одноканальным релейным управлением: аэро— и газодинамическим на участке разгона и аэродинамическим на маршевом участке;
2) двухступенчатая тандемная твёрдотопливная двигательная установка;
3) одноканальная пассивная оптическая тепловая гироскопическая система самонаведения по методу пропорционального сближения;
4) боевая часть осколочно-фугасного действия с контактным взрывателем;
5) бортовой источник энергии на основе порохового аккумулятора давления.
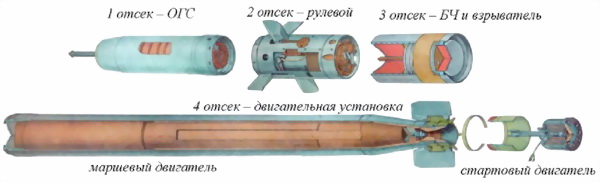
Рис. 17. Отсеки ракеты
Конструктивно ракета 9М39 состоит из скрепленных между собой отсеков (рис. 17):
• В отсеке ОГС размещены три основные системы: координатор цели, следящая система координатора и автопилот (формирователь сигнала управления рулями — ФСУР).
• В рулевом отсеке размещены: рулевая машина с рулями, дестабилизаторы, датчик угловой скорости с усилителем, бортовой источник питания (БИП), пороховой аккумулятор давления (ПАД), пороховой управляющий двигатель (ПУД).
• В отсеке боевой части размещены собственно боевая часть, контактный взрыватель, взрывной генератор и провода электрической связи с БИП.
• В отсеке двигательной установки последовательно расположены двухрежимный маршевый двигатель и стартовый двигатель. С наружной стороны на сопловой блок установлены крылья.
Таблица 5
Основные тактико-технические характеристики ракеты
1 Калибр, мм 72,2 2 Длина, мм 1639 3 Масса, кг 10,6 4 Масса боевой части, кг 1,27 5 Угол зрения ОГС, град. 2 6 Угол пеленга ОГС, град. ±38 7 Скорость выброса из трубы, м/с 28–30 8 Скорость полёта на марше, м/с 340–570 9 Скорость вращения относительно продольной оси, об/с 12–20 10 Располагаемые перегрузки до 10,2 11 Время готовности к пуску, с до 5 12 Диапазон рабочих температур, °С от –44 до +50Планер
Планер ракеты 9М39 предназначен для решения следующих задач:
1) создания управляющей силы, изменяющей направление полёта;
2) гашения колебаний корпуса, возникающих при управлении;
3) стабилизации ракеты в направлении полёта;
4) поддержания скорости вращения ракеты в полёте;
5) создания подъёмной силы;
6) размещения бортовой аппаратуры.
Планер выполнен по аэродинамической схеме «утка» и состоит из:
• носового обтекателя с аэродинамическим насадком;
• корпуса;
• рулей;
• дестабилизаторов;
• крыльев.
Носовой обтекатель с аэродинамическим насадком предназначен для снижения лобового аэродинамического сопротивления ракеты и пропускания лучистой энергии от цели с минимальными потерями. Обтекатель выполнен из специального стекла в виде мениска. Металлический насадок, кроме снижения сопротивления, ещё и уменьшает нагрев обтекателя.
Корпус планера предназначен для создания подъёмной силы и размещения бортовой аппаратуры. Как уже отмечено, корпус состоит из скрепленных между собой цилиндрических отсеков.
Рули предназначены для создания управляющей силы, изменяющей направление полёта, и гашения колебаний корпуса, возникающих при управлении. Они представляют собой пару аэродинамических пластин из прочной стали. Их форма обеспечивает оптимальное обтекание конструкции сверхзвуковым воздушным потоком и создание управляющей силы требуемой величины. Когда ракета находится в пусковой трубе, рули сложены в отверстия в корпусе рулевого отсека и размыкают цепи блока взведения взрывателя. После выхода вращающейся ракеты из трубы рули под действием центробежных сил и пружин стопоров раскрываются, надёжно фиксируются в рабочем положении и коммутируют цепи питания взрывателя и порохового управляющего двигателя (ПУД).
При одноканальном управлении вращающейся ракетой для создания управляющей силы в любом направлении полёта рули перебрасываются рулевой машиной из одного крайнего положения в другое (на ±15°) 4 раза за один оборот вращения ракеты. Для этого ОГС, определяя ошибку наведения ракеты, формирует релейный сигнал управления рулевой машиной, задающий время нахождения рулей в каждом из 4 крайних положений.
Рис. 18. Создание результирующей аэродинамической силы R в соответствии с управляющим сигналом
Так как на участке разгона ракеты эффективность рулей недостаточна, то предусматривается параллельное газодинамическое управление с помощью двух сопел, расположенных в плоскости, перпендикулярной плоскости рулей, но по разные стороны корпуса. Реактивную силу создают пороховые газы ПУД, истекающие через то или другое сопло. Коммутация сопел осуществляется той же рулевой машиной синхронно с перебросом рулей.
Дестабилизаторы расположены в плоскости, перпендикулярной плоскости рулей, и имеют аналогичную им форму, но меньших размеров, складываются в углубления в корпусе и неподвижны после раскрытия. Они предназначены для оптимизации соотношения устойчивости и управляемости (располагаемых перегрузок) ракеты путём выбора положения центра давления относительно центра масс и поддержания вращения ракеты из-за их разворота относительно продольной оси.
Крылья выполнены в виде крыльевого блока, закрепленного на корпусе сопла маршевого двигателя по схеме «Х-+» относительно рулей. Крыльевой блок предназначен для стабилизации ракеты в направлении полёта, поддержания скорости вращения ракеты и создания подъёмной силы при наличии углов атаки.
Крыльевой блок состоит из корпуса, четырех складывающихся крыльев и механизма их стопорения. Корпус из алюминиевого сплава имеет:
1) отверстия для крепления блока;
2) 4 выступа для крепления стартового двигателя с помощью разжимного кольца;
3) 4 отверстия для установки механизма стопорения;
4) 4 отверстия для установки осей складывания крыльев.
До выхода ракеты из трубы крылья сложены против часовой стрелки. При выходе из трубы крылья под действием центробежных сил раскрываются и надёжно фиксируются механизмом стопорения.
Оптическая головка самонаведения
Оптическая головка самонаведения 9Э410 предназначена для формирования сигнала управления, обеспечивающего пассивное самонаведение ракеты по методу пропорционального сближения.
ОГС представляет собой оптическое приёмное устройство и решает следующие задачи:
1) пространственная селекция целей;
2) спектральная селекция инфракрасного излучения поражаемых целей, ложных тепловых целей (ЛТЦ), фоновых помех и защита от них;
3) преобразование инфракрасного излучения выбранной для обстрела цели в электрический сигнал ошибки слежения, пропорциональный пространственному рассогласованию оптической оси ОГС и линии визирования «ракета — цель»;
4) захват и автоматическое сопровождение цели оптической осью (сведение ошибки слежения к нулю);
5) формирование сигнала управления ракетой, пропорционального угловой скорости линии визирования (по методу пропорционального сближения).
Рис. 19. Отсек ОГС 9Э410
Решение задачи пространственной селекции целей осуществляется созданием узкого поля зрения ОГС (2°) за счёт применения зеркально-линзовой оптической системы (объектива). Однако узкое поле зрения потребует точного прицеливания и принудительного совмещения оптической оси объектива с линией прицеливания.
Для пространственной селекции оптического излучения объектов выбор угла поля зрения носит характер оптимизации: при очень малом угле затрудняется наведение и сопровождение, а при большом — повышается объём информации, в том числе ложной. Величина угла зависит от отношения фокусного расстояния и диаметра кадра объектива.
Задача спектральной селекции инфракрасного излучения поражаемых целей, ложных тепловых целей (ЛТЦ), фоновых помех и защита от них решается путём избирательного двухканального приёма инфракрасного излучения поражаемых целей и помех.
Физическими основами пассивной оптической локации является то, что все тела, температура которых выше абсолютного нуля, излучают электромагнитные волны в оптическом диапазоне. Оптический диапазон лежит между радио— и рентгеновским излучением и включает в себя:
• инфракрасное излучение с длиной волны ? = 1000–0,78 мкм;
• видимое излучение — ? = 0,78–0,4 мкм;
• ультрафиолетовое излучение — ? = 0,4–0,001 мкм.
При этом также известно, что:
• максимум спектральной интенсивности излучения Солнца, его фоновых отражений достигается при ? = 1 мкм, а ложных тепловых целей (ЛТЦ) — при ? = 2 мкм;
• нагретые элементы сопел реактивных двигателей и выхлопных патрубков поршневых двигателей, а также их выхлопные газовые струи имеют инфракрасное (тепловое) излучение в узком диапазоне длин волн 2,6–6,5 мкм.
При построении приёмных устройств для инфракрасного излучения в объективах создаются входные оптические полосовые фильтры, которые, в принципе, могут быть созданы различными методами: интерференцией, избирательным поглощением, избирательным отражением, избирательным преломлением и поляризацией.
Использование в приёмниках оптических фильтров позволяет:
• выделить из всего потока лучистой энергии только инфракрасное излучение целей и помех;
• образовать в приемном устройстве два спектральных канала: основной (ОК) — поражаемых целей и вспомогательный (ВК) — помех.
Сравнение уровней сигналов в ОК и ВК позволяет выстроить логику селекции и защиты:
ВК/ОК < 1 — цель; ВК/ОК ? 1 — фон; ВК/ОК > 1 — ЛТЦ.
Задача преобразования инфракрасного излучения выбранной для обстрела цели в электрический сигнал ошибки слежения, пропорциональный пространственному рассогласованию оптической оси ОГС и линии визирования «ракета — цель» решается следующим образом:
• Оптическая система формирует в фокальной плоскости изображение цели в виде пятна малых размеров (положение пятна в фокальной плоскости однозначно характеризует направление (?) и величину угла (А) рассогласования оптической оси и линии визирования, т. е. ошибку слежения).
• Модулятор приемного устройства, расположенный в фокальной плоскости, производит сканирование положения пятна и модуляцию потока лучистой энергии по закону ошибки слежения. В качестве модуляторов нашли применение вращающиеся диски — растры с чередующимися прозрачными и непрозрачными участками.
Рис. 20. Принцип формирования изображения цели и ошибки слежения
• Фотодетекторы приёмного устройства преобразовывают модулированный лучистый поток в пропорциональный электрический сигнал ошибки слежения. В качестве детекторов наибольшее применение нашли фоторезисторы — полупроводниковые приборы, не содержащие p — n перехода. В них при поглощении фотонов генерируются электронно-дырочные пары, создающие, при приложении внешнего электрического поля ток в рабочей цепи. Подбором материала и температуры фоторезистора можно обеспечить требуемый диапазон его спектральной чувствительности.
Для обеспечения захвата и автоматического сопровождения выбранной для обстрела цели необходимо:
1. Принудительно совместить (арретировать) оптическую ось ОГС с линией прицеливания пусковой трубы (реализуется автоматически при выдаче питания от наземного источника).
2. Прицелиться (совместить линию прицеливания с направлением на цель).
3. Для перехода на автоматическое сопровождение нажать на пусковой крючок (до положения «РР» — разрешение разарретирования). При этом следящая система разарретируется и начинает работать. Задающим воздействием для следящей системы является сигнал ошибки слежения, а в качестве исполнительного элемента используется свободный гироскоп, на роторе которого и закреплён объектив. Под действием электромагнитного момента внешних сил, создаваемого следящей системой, ротор гироскопа прецессирует в сторону уменьшения ошибки слежения, причем с угловой скоростью, пропорциональной ошибке слежения.
Формирование сигнала управления ракетой по методу пропорционального сближения осуществляет автопилот. Он представляет собой одноканальную систему автоматического регулирования и структурно состоит из формирователя сигнала управления рулями (ФСУР) и рулевой машины (РМ).
Объектом управления автопилота являются рули планера ракеты. С помощью планера изменяется положение ракеты относительно цели (т. е. изменяется положение линии визирования «ракета — цель»).
При управлении полётом по методу пропорционального сближения ракета наводится не на цель, а в некоторую упрежденную точку встречи (УТВ) по условию равенства нулю угловой скорости поворота линии визирования, т. е. наличие угловой скорости линии визирования свидетельствует об ошибке наведения, которую автопилот должен свести к нулю.
Измерителем угловой скорости линии визирования является гироскопический следящий координатор, сопровождающий цель. При этом информация об угловой скорости линии визирования содержится в сигнале ошибки слежения, поэтому он подается на автопилот как сигнал ошибки наведения.
Для решения этих задач ОГС имеет следующую структуру и состав:
I. Следящий координатор цели (СКЦ):
1. Свободный гироскоп:
а) статор:
• катушки вращения (КВ);
• катушки коррекции (КК);
• катушки генератора опорных напряжений (ГОН);
• катушки пеленга (П);
б) ротор:
• карданов подвес;
• постоянный магнит;
• координатор;
• оптическая система (О);
• фотоприёмники основного и вспомогательного каналов (ФПок, ФПвк);
2. Системы автоматического управления:
а) следящая система арретирования и коррекции ротора гироскопа (СС);
б) система стабилизации оборотов ротора гироскопа (ССО).
II. Автопилот:
1. Формирователь сигнала управления рулями (ФСУР).
2. Газовая рулевая машина (и пороховой управляющий двигатель).
УСТРОЙСТВО И РАБОТА ОГС
Оптическая система
Оптическая система предназначена для избирательного приёма инфракрасного излучения поражаемых целей и помех и фокусировки его в фокальных плоскостях основного и вспомогательного спектральных каналов координатора.
В ОГС 9Э410 применена зеркально-линзовая оптическая система, состоящая из следующих элементов:
1) обтекатель;
2) главное зеркало;
3) корригирующая линза;
4) контрзеркало;
5) спектроразделительный фильтр.
Все элементы оптической системы, за исключением обтекателя, размещены на валу ротора гироскопа и образуют объектив, имеющий шесть степеней свободы:
• вращение относительно 3 осей связанной системы координат (начало координат — в точке карданного подвеса ротора):
— вкруговую по крену (относительно оптической оси);
— на углы ±38° по тангажу и рысканию (углы пеленга цели);
• перемещение вместе с ракетой по 3 осям земной системы координат.
Фокусное расстояние (F) такого объектива равно пути оптического потока от зеркала до фоторезистора, расположенного в фокальной плоскости.
Угол зрения объектива (?) равен отношению диаметра фотосопротивления (d) к фокусному расстоянию:
? = d/F, град.
Телесный угол поля зрения ? ? ?2, стерадиан.
Рис. 21. Прохождение оптических сигналов цели и помехи в объективе ОГС:
1 — обтекатель; 2 — контрзеркало; 3 — фоторезистор ВК; 4 — фоторезистор ОК; 5 — корригирующая линза; 6 — спектроразделительный фильтр; 7 — главное зеркало-магнит
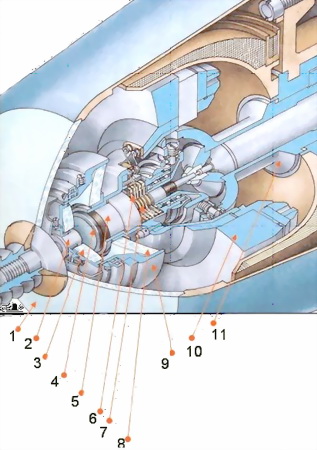
Рис. 22. Устройство оптической системы ОГС:
1 — обтекатель; 2 — фотоприемник ВК; 3 — контрзеркало; 4 — спектрораздельный фильтр; 5 — фотоприемник ОК; 6 — обойма; 7 — коллектор; 8 — корригирующая линза; 9 — бленда; 10 — главное зеркало; 11 — карданов подвес
1. Обтекатель, как оптический компонент, является слабой отрицательной (рассеивающей) линзой. Он выполнен в виде мениска, ограниченного двумя сферическими поверхностями, из ИК-прозрачного материала с высокой излучательностью, теплопроводностью и теплоёмкостью.
2. Главное зеркало образовано сферической поверхностью торца магнита ротора гироскопа. В качестве отражательного слоя используется пленка серебра.
3. Корригирующая линза — афокальная линза (с фокусом в бесконечность) выполняет функцию коррекции искажений оптического потока (возникающих из-за неточностей изготовления линз и немонохромности потока).
4. Контрзеркало — фокусирующий элемент с отражающей плёнкой серебра.
5. Спектроразделительный фильтр — оптический компонент, выполненный из специального стекла, прозрачного для излучения с ? = 2,6–6,5 мкм и отражающего сигналы с ? = 0,46–4 мкм.
Таким образом, инфракрасное излучение истинных и ложных целей, попавших в узкое поле зрения объектива, слабо рассевается обтекателем, обеспечивая засветку рабочей поверхности главного зеркала при наличии ошибки слежения (при отсутствии ошибки излучение экранируется корпусом бленды объектива).
Отразившись от главного зеркала, оптический поток проходит через корригирующую линзу на контрзеркало. Коррекцией устраняются отклонения потока от заданного направления (погрешности изображения — аберрации).
Отразившись от контрзеркала, оптический поток направляется на спектроразделительный фильтр. Благодаря фильтру инфракрасное излучение истинной цели фокусируется в пятно диаметром 1 мм в фокальной плоскости основного спектрального канала, а инфракрасное излучение ложных тепловых целей (ЛТЦ) и помех фокусируется в фокальной плоскости вспомогательного спектрального канала.
Важно, что положение пятна в фокальной плоскости однозначно характеризует направление и величину рассогласования между оптической осью объектива и линией визирования «ракета — цель» (т. е. определяет ошибку слежения).
Фотоприёмник
Фотоприёмник координатора ОГС 9Э410 предназначен для преобразования информации об ошибке слежения, заложенной в положении теплового пятна в фокальной плоскости объектива, в электрический сигнал.
Он представляет собой двухканальный оптический детектор, имеющий:
• основной канал с охлаждаемым фоторезистором для сигналов поражаемых целей;
• вспомогательный канал для сигналов помех.
Каждый канал фотоприемника состоит:
1) из модулятора;
2) фоторезистора (в ОК — с системой охлаждения);
3) предварительного усилителя;
4) схемы автоматической регулировки усиления.
Все элементы фотоприёмника также размещены на валу ротора гироскопа и вращаются с ним относительно статора с частотой f2 = 100 Гц — до пуска и f2 + f3 = 112–120 Гц — в полёте, обеспечивая стабильную частоту сканирования цели fск = 100 Гц.
1. Модулятор представляет собой непрозрачную маску с прямоугольным окном, нанесенную на фоточувствительный слой фоторезистора. При такой форме растра модулятора реализуется импульсный метод модуляции теплового потока. Период повторения тепловых импульсов будет равен T = 1/fск = 0,01 c, а за начало отсчета периода принимается связанная ось ОгУг (направленная вертикально вверх).
При этом информация об ошибке слежения содержится:
• во временном положении импульса в периоде сканирования (?н) как направление ошибки слежения (?);
• в длительности импульса (?и) как величина ошибки слежения (??). Очевидно, что чем дальше тепловое пятно от центра диска, тем больше линейная скорость пересечения им окна, тем меньше длительность импульса.
? = S/2?Rn ? Tск,
где S — ширина окна; Rп — расстояние от центра диска до пятна; Тск — период сканирования.
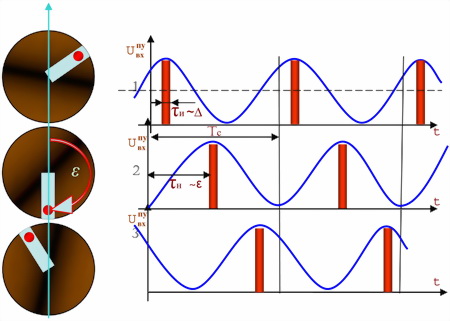
Рис. 23. Формирование сигнала ошибки слежения в зависимости от положения пятна
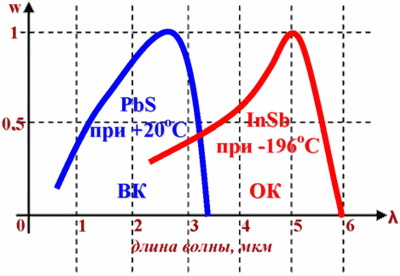
Рис. 24. Чувствительность фоторезисторов основного и вспомогательного каналов
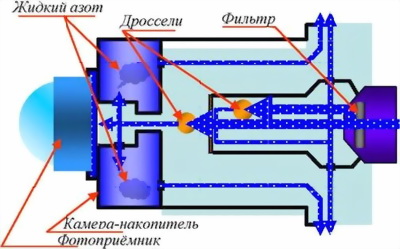
Рис. 25. Устройство фоторезистора основного канала
2. Фоторезистор — полупроводник, обладающий свойством фотопроводимости, т. е. способностью генерировать электронно-дырочные пары при поглощении тепловых фотонов. Спектральная чувствительность фоторезистора определяется материалом и температурой полупроводника.
В качестве фоторезистора основного канала используется монокристалл антимонида индия, охлажденный до температуры 77 К (–196 °C) для повышения спектральной чувствительности в области 5 мкм.
Система охлаждения фоторезистора основного канала работает по принципу дросселирования сжатого газообразного азота до перехода его в жидкую фазу с tкип=–196 °C. В качестве источника азота, сжатого до 350 атм, используется баллон наземного источника питания. При нахождении ракеты в пусковой трубе баллон газопроводом соединяется с микрохолодильником «брызгающего» типа.
Жидкий азот с выхода микрохолодильника омывает основание фоторезистора и пропитывает набивку накопителя жидкого азота, обеспечивая требуемую температуру фоторезистора в течение заданного времени.
Под действием тепловых импульсов цели в рабочей цепи фоторезистора будет протекать импульсный ток, т. е. произойдет детектирование модулированного теплового потока — преобразование ошибки слежения в синхронный электрический сигнал.
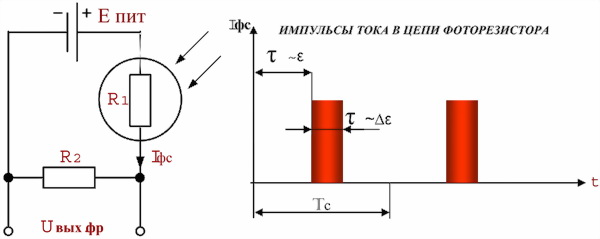
Рис. 26. Получение импульсов тока в цепи фоторезистора
Во вспомогательном канале используется неохлажденный фоторезистор на основе сернистого свинца, чувствительный к излучению ложных тепловых целей с максимумом 2–3 мкм.
3. Предварительный усилитель представляет собой широкополосный усилитель низкой частоты, позволяющий:
• усилить информационный сигнал до уровня надёжной работы последующих устройств;
• преобразовать сигнал ошибки слежения из импульсной формы (видеосигнал постоянного тока с бесконечным спектром частот) в сигнал переменного тока со значительно сокращенным диапазоном частот.
Выходной сигнал предварительно го усилителя имеет сложную форму и содержит в себе множество гармонических колебаний, в том числе и первую гармонику частоты сканирования, которая в дальнейшем используется в качестве информационного сигнала об ошибке слежения за целью.
Для выделения первой гармоники и применяют последовательное сокращение диапазона частот сигнала ошибки слежения с помощью предварительного усилителя, избирательного усилителя, амплитудного детектора, усилителя коррекции СКЦ.
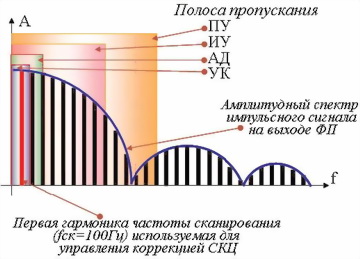
Рис. 27. Спектральное преобразование сигнала ошибки слежения
4. Схема автоматической регулировки усиления представляет собой отрицательную обратную связь, изменяющую коэффициент усиления предварительных усилителей и тем самым стабилизирующую параметры сигнала ошибки при изменении мощности принимаемого излучения.
Таким образом, тепловое излучение цели и помех, сфокусированное объективом, проецируется в виде пятен малого размера на диски модуляторов соответственно основного и вспомогательного каналов фотоприёмника.
Благодаря тому, что диски модуляторов размещены в фокальных плоскостях объектива и ось их вращения совпадает с его оптической осью, положение пятна на диске однозначно характеризует угловое рассогласование между линией визирования и оптической осью объектива, т. е. ошибку слежения координатора. Благодаря вращению и специальной форме прозрачного окна дисков происходит круговое сканирование положения цели (и ЛТЦ) в пределах поля зрения ОГС и преобразование информации об ошибке слежения из пространственного вида в импульсную модуляцию теплового потока.
Охлаждаемый фоторезистор основного канала преобразует модулированный тепловой поток цели в синхронный импульсный электрический сигнал постоянного тока. Причем в длительности импульса содержится информация о величине, а во временном положении импульса в периоде сканирования — о направлении ошибки слежения за целью.
Предварительный усилитель преобразует сигнал постоянного тока в цепи фоторезистора в сигнал переменного тока, содержащий в себе первую гармонику частоты сканирования. Амплитуда сигнала частоты сканирования несёт информацию о величине, а фаза — о направлении ошибки слежения.
Охлаждение фоторезистора до температуры –196 °C позволяет не только задать спектральный диапазон излучения поражаемых целей, но и значительно повысить чувствительность фотоприёмника на фоне тепловых помех. Охлаждающее устройство фоторезистора основного канала дросселирует сжатый до 350 атм азот, хранящийся в баллоне наземного источника питания. При понижении давления азот переходит в жидкое состояние с температурой –196 °C (77 К), охлаждает фоторезистор и накапливается в специальном корпусе с набивкой. Охлаждающее устройство обеспечивает достижение заданной температуры фоторезистора за 4,5 с перед пуском и подержание её в течение 14 с после пуска.
Неохлаждаемый фоторезистор вспомогательного канала чувствителен к тепловому излучению ложных тепловых целей (ЛТЦ) и аналогично преобразует его в электрический сигнал.
Повышению качества сигнала ошибки слежения, а в целом и наведения ракеты на цель способствует и автоматическая регулировка усиления, работающая по сигналу предварительного ПУок. Сигнал ошибки слежения за целью с выхода фотоприемника основного канала поступает на схему переключения и схему ближней зоны электронного блока ОГС. Сигнал ЛТЦ с выхода фотоприемника вспомогательного канала поступает на схему переключения.
Следящая система координатора цели
Следящая система предназначена для автоматического слежения координатора за целью и на основе этого определения угловой скорости линии визирования, необходимой для реализации метода пропорционального сближения при наведении ракеты в упрежденную точку встречи с целью.
Для этого следящая система решает следующие задачи:
1. Непрерывно автоматически совмещает оптическую ось координатора (ХК) с линией визирования цели (ХВ), т. е. сводит ошибку слежения координатора к нулю (?? ? 0).

Рис. 28. К работе следящей системы координатора цели
2. При ?? ? 0 появляется возможность измерения угловой скорости виртуальной линии визирования (d?в/dt) как угловой скорости поворота самого координатора (d?к/dt), т. е. d?в/dt = d?к/dt.
3. При использовании гироскопического привода координатора угловая скорость его прецессии (поворота координатора) пропорциональна величине внешнего управляющего момента, а последний пропорционален ошибке слежения, т. е. d?в/dt ? ??.
4. При реализации метода пропорционального сближения за параметр управления (ошибку наведения ??(t)) принимается d?в/dt, а система наведения ракеты на цель будет стремиться свести ошибку наведения к нулю путём изменения угла пеленга ?, т. е. ?? = ?(t) ? 0.
5. В системе наведения ракеты на цель следящий координатор является датчиком ошибки наведения, а автопилот — следящим приводом. Поэтому в качестве управляющего сигнала для автопилота используется сигнал ошибки слежения координатора, т. е. UВХАП = ??.
Структурно следящая система координатора построена по классической схеме, в которой с точки зрения автоматического управления:
1. Объектив одновременно выполняет роль датчика цели (положения линии визирования ?в) и датчика отрицательной обратной связи (положения оптической оси координатора ?к).
2. Фотоприёмник выполняет роль алгебраического сумматора, формирующего электрический сигнал рассогласования (ошибки слежения координатора ?? = ?в — ?к).
3. Электронный блок выполняет роль усилительно-преобразовательного тракта, формирующего электрические управляющие сигналы для исполнительного элемента следящей системы координатора (U??) и автопилота: Ud?в/dt. Причем U?? = U ? d?в/dt.
4. Статорные катушки коррекции гироскопа выполняют роль исполнительного элемента, создающего электромагнитный внешний момент ротора.
5. Ротор гироскопа является объектом управления следящей системы. Под действием внешнего момента он прецессирует в сторону уменьшения ошибки слежения.
6. Так как координатор цели механически связан с ротором гироскопа, то следящая система заставляет его непрерывно сопровождать цель оптической осью и на основе этого формирует сигнал угловой скорости линии визирования для автопилота.
Для обеспечения боевого применения ракеты следящий координатор имеет ещё две вспомогательные системы автоматического управления:
1. Система арретирования координатора предназначена для принудительного совмещения при прицеливании оптической оси координатора с линией прицеливания пусковой трубы, чем обеспечивается захват цели узким полем зрения ОГС. Причем линия прицеливания наклонена вниз на 10° относительно продольной оси пусковой трубы, что исключает удар ракеты о землю при старте.
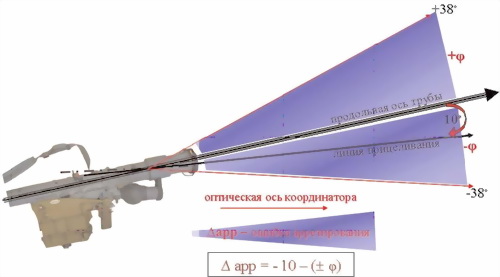
Рис. 29. К работе системы арретирования координатора
Принцип работы этой системы основан на использовании катушки пеленга, размещенной на статоре гироскопа, и катушки заклона, размещенной в блоке датчиков пусковой трубы. Постоянный магнит ротора наводит в катушке пеленга синусоидальный сигнал, характеризующий направление (фазу) и величину (амплитуду) отклонения оптической оси от продольной оси ракеты (угол пеленга ?). Катушка заклона, включенная встречно с катушкой пеленга, формирует синусоидальный сигнал, характеризующий заданное отклонение линии прицеливания от продольной оси ракеты (–10°). Таким образом, разностный сигнал двух катушек значит ошибку арретирования оптической оси относительно линии прицеливания (?арр).
При прицеливании сигнал ошибки арретирования подается на вход следящей системы координатора и отрабатывается ею до ?арр = 0 (оптическая ось удерживается на линии прицеливания). При нажатии на спусковой крючок и загорании сигнальной лампочки захвата цели от следящей системы отключается сигнал ошибки арретирования, а подключается сигнал ошибки слежения координатора (??).
2. Система разгона и стабилизации оборотов ротора гироскопа предназначена для задания стабильной частоты сканирования цели f2 = 100 Гц.
Для этого система должна:
• до пуска ракеты разогнать ротор гироскопа до 100 оборотов в секунду относительно статора (корпуса ракеты) и поддерживать этот уровень;
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
ПЗРК
ПЗРК Война в Афганистане стала первым конфликтом, в котором массово применялись ПЗРК, причем как против вертолетов, так и против самолетов. Именно здесь советские специалисты отрабатывали меры и способы борьбы с ПЗРК и усиление живучести вертолетов, а американцы —
1 Состав, организационная структура и функционирование военно-окружной системы в условиях большой войны
1 Состав, организационная структура и функционирование военно-окружной системы в условиях большой войны Давно ожидаемый общеевропейский кризис стал реальностью летом 1914 г. 28 июня в Сараеве сербскими националистами был убит наследник австрийского престола эрцгерцог
Устройство
Устройство Артиллерия главного калибра .Из-за множества проблем с 406-мм орудиями, обладавшими высокой дульной скоростью снаряда, Королевский Флот относился к ним неблагосклонно. Новые 356-мм орудия MK-VII с длиной ствола 45 калибров стреляли снарядами весом 721 кг. Полный заряд
Устройство
Устройство Корпуса броненосцев строили из мягкой судостроительой (мартеновской) стали, иногда называемой литым железом Сименс-Мартена. Этот сорт стали в тот период времени начали использовать в судостроении. Бронирование осуществили поверхностно-закалённой
Устройство
Устройство Корпус. По проекту длина корабля между перпендикулярами согласно источнику 10], составляла 157,4 м; по КВЛ, согласно Эверс [5], Вгауег [6], Groner [8] и источнику [11] – 166,5 м; источнику [10] – 166,55 м, и наибольшая, согласно Вгауег [6], Conwey [7], Groner [8], Hildebrand [9], источникам [10] и [11] – 167,2
Устройство
Устройство Корпус и наружный видЛинейные корабли типа "Орион" имели характерный для своего времени корпус со слегка изогнутым форштевнем, сохранившим таранное образование (шпирона как такового не было), округлой кормой с подзором и длинным полубаком, доходящим до
5. Устройство
5. Устройство 1. КорпусПо "Шарль-Мартэль" под-инженер Калу составил, очевидно для офицеров броненосца, очень подробную описательную записку. Из неё мы возьмём наиболее интересные моменты. Немногочисленные чертежи, используемые в качестве иллюстраций, взяты
Устройство
Устройство Устройство пулемёта MG 4: 1 – ствол; 2 – основание мушки; 3 – газовая камера; 4 – рукоятка для переноски оружия и смены ствола;5 – сигнальный флажок; 6 – крышка ствольной коробки с подающим механизмом; 7 – рычаг подающего механизма; 8 – отражатель; 9 – прицел; 10 –
ПЗРК
ПЗРК Переносные зенитно-ракетные комплексы (ПЗРК) поставлялись и поставляются на Чёрный континент из различных стран: китайские FN-6; (HN-5) (копия советской Стрелы-2) советские и российские Стрела-2, Стрела-2М, Стрела-3, Игла-1 (Игла-1С), Верба;английские Блоупайп (Blowpipe), Starstreak
2. ЭКСПЛУАТАЦИЯ ПЗРК
2. ЭКСПЛУАТАЦИЯ ПЗРК 2.1. Общие сведения об эксплуатации вооружения и военной техники в войсковых частяхВ совершенствовании Вооруженных сил решающую роль играет оснащение их новейшими образцами оружия, дальнейшее развитие методов боевого применения и организации