4.3. Принцип работы системы стабилизации
Работа системы стабилизации заключается в следующем (рис. 4.9).
РЛС 1РЛ33 сопровождает воздушную цель и определяет ее координаты – ?, ? и Д, которые поступают в СРП. СРП решает задачу встречи снаряда с целью и определяет координаты упрежденной точки – ?у и ?.
Эти координаты поступают в орудийный преобразователь координат. Туда же с ГАГ поступают углы продольной и поперечной качки самохода ?, ?, а также со следящей системы К – угол курса К.
ОПК вырабатывает полные углы вертикального и горизонтального наведения пушки Ф и Q, которые отрабатываются приводами наведения. В результате этого стволы пушки постоянно наводятся в упрежденную точку с учетом углов поперечной и продольной качки самохода.
В визирный преобразователь координат с антенны РЛС поступают угловые координаты цели – ? и ?. Кроме этого, туда же поступают углы продольной и поперечной качки самохода ?, ? и угол курса К.
ВПК вырабатывает углы поворота антенны ?? и ?q. Эти углы отрабатываются следящими приводами стабилизации ?? и ?q, тем самым ось антенны удерживается неподвижной относительно земли при продольной и поперечной качке ЗСУ.
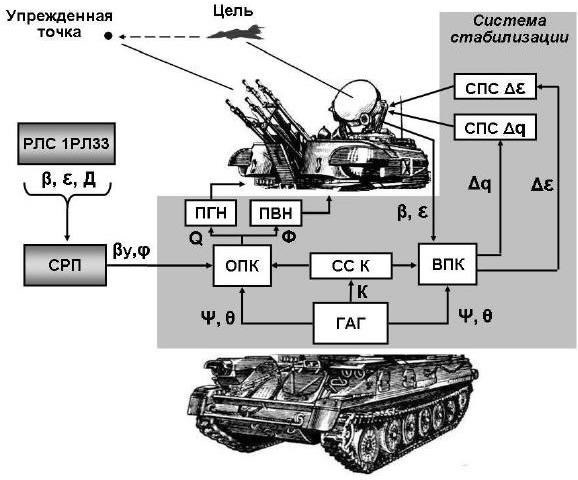
Рис. 4.9. Функциональная схема системы стабилизации

Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.